ĐẠI HỌC THÁI NGUYÊN
TRƯỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP
NGUYỄN VĂN ĐOÀN
NGHIÊN CỨU THIẾT KẾ BỘ ĐIỀU KHIỂN BỀN VỮNG
CHO MẠCH VÒNG DÒNG ĐIỆN CỦA HỆ THỐNG ĐIỀU KHIỂN
MÁY PHÁT ĐIỆN SỨC GIÓ
LUẬN VĂN THẠC SỸ KỸ THUẬT
KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
Thái Nguyên - Năm 2020
i
ĐẠI HỌC THÁI NGUYÊN
TRƯỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP
NGUYỄN VĂN ĐOÀN
NGHIÊN CỨU THIẾT KẾ BỘ ĐIỀU KHIỂN BỀN VỮNG
CHO MẠCH VÒNG DÒNG ĐIỆN CỦA HỆ THỐNG ĐIỀU KHIỂN
MÁY PHÁT ĐIỆN SỨC GIÓ
NGÀNH KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
MÃ SỐ: 8.52.02.16
LUẬN VĂN THẠC SỸ KỸ THUẬT
KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
NGƯỜI HƯỚNG DẪN KHOA HỌC:
TS. Nguyễn Thị Mai Hương
Thái Nguyên – Năm 2020
1
LỜI CAM ĐOAN
Tên tôi là: Nguyễn Văn Đoàn
Sinh ngày18 tháng 02 năm 1970
Học viên lớp cao học khoá 21 chuyên ngành Kỹ thuật điều khiển và tự động hóa
-
Trường đại học kỹ thuật Công nghiệp Thái Nguyên.
Hiện đang công tác tại: Trường Cao đẳng Công Nghệ và Nông lâm Đông Bắc, xã
Minh Sơn, huyện Hữu lũng, tỉnh Lạng Sơn
Tôi xin cam đoan luận văn “Nghiên cứu thiết kế bộ điều khiển bền vững
cho mạch vòng dòng điện của hệ thống điều khiển máy phát điện sức gió” do cô
giáo TS. Nguyễn Thị Mai Hương hướng dẫn là nghiên cứu của tôi với tất cả các tài
liệu tham khảo đều có nguồn gốc, xuất xứ rõ ràng.
Thái Nguyên, ngày 17 tháng 9 năm 2020
Học viên
Nguyễn Văn Đoàn
2
LỜI CẢM ƠN
Sau thời gian nghiên cứu, làm việc khẩn trương và được sự hướng dẫn tận tình
giúp đỡ của cô giáo TS. Nguyễn Thị Mai Hương, Luận văn với đề tài “Nghiên cứu
thiết kế bộ điều khiển bền vững cho mạch vòng dòng điện của hệ thống điều
khiển máy điện phát sức gió” đã được hoàn thành.
Tác giả xin bày tỏ lòng biết ơn sâu sắc tới:
Cô giáo hướng dẫn TS. Nguyễn Thị Mai Hương đã tận tình chỉ dẫn, giúp đỡ tác
giả hoàn thành luận văn. Các thầy cô giáo Trường Đại học kỹ thuật công nghiệp Thái
Nguyên, và một số đồng nghiệp, đã quan tâm động viên, giúp đỡ tác giả trong suốt
quá trình học tập để hoàn thành luận văn này.
Mặc dù đã cố gắng hết sức, tuy nhiên do điều kiện thời gian và kinh nghiệm
thực tế của bản thân còn ít, cho nên đề tài không thể tránh khỏi thiếu sót. Vì vậy, tác
giả mong nhận được sự đóng góp ý kiến của các thầy giáo, cô giáo và các bạn bè
đồng nghiệp cho luận văn của tôi được hoàn thiện hơn.
Tôi xin chân thành cảm ơn!
Thái Nguyên, ngày 17 tháng 9 năm 2020
Tác giả luận văn
Nguyễn Văn Đoàn
3
MỤC LỤC
LỜI CAM ĐOAN .......................................................................................................2
LỜI CẢM ƠN .............................................................................................................3
CHƯƠNG 1. TỔNG QUAN .....................................................................................11
1.1 Khái quát về năng lượng gió ........................................................................11
1.2 Hệ thống phát điện sức gió sử dụng máy điện không đồng bộ nguồn kép và
các phương pháp điều khiển ..................................................................................13
1.3 . Mô hình và cấu trúc điều khiển hệ thống phát điện sức gió sử dụng Máy phát
không đồng bộ nguồn kép .....................................................................................15
Kết luận chương 1 .................................................................................................19
2.1. Ma trận xác định dương..................................................................................20
2.1.1. Bất đẳng thức ma trận tuyến tính .............................................................20
2.1.2. Chuẩn 𝑯∞ ..............................................................................................20
2.2. Phương trình và bất phương trình đại số Riccati............................................21
2.2.1. Bổ đề chặn biên .......................................................................................21
2.2.2. Bổ đề bù Schur.........................................................................................22
2.2.3 Biến đổi phân thức tuyến tính ...................................................................22
2.3. Tính chuẩn 𝑯∞ .............................................................................................23
2.4. Bài toán điều khiển 𝑯∞ ................................................................................26
2.5. Thiết kế bộ điều khiển 𝑯∞ cho các hệ thống tuyến tính .............................27
2.5.1. Bổ đề thực bị chặn ...................................................................................27
2.5.2. Chất lượng 𝑯∞ .......................................................................................28
2.5.3. Điều khiển cận tối ưu 𝑯∞ ......................................................................30
2.5.4. Tổng hợp bộ điều khiển 𝑯∞ ..................................................................31
2.5.5. Phương pháp độ nhạy hỗn hợp 𝑯∞........................................................32
Kết luận chương 2 .................................................................................................34
CHƯƠNG 3. THİẾT KẾ BỘ ĐİỀU KHİỂN BỀN VỮNG CHO MẠCH VÒNG
DÒNG ĐİỆN CỦA MÁY PHÁT ĐİỆN KHÔNG ĐỒNG BỘ NGUỒN KÉP ........34
3.1. Mô hình toán học của máy phát điện không đồng bộ nguồn kép (MPKĐBNK)
...............................................................................................................................34
4
3.2. Thiết kế bộ điều khiển bền vững cho mạch vòng dòng điện rotor .................35
3.2.1. Biểu diễn LFT với các tham số biến thiên 𝝎𝒎 và 𝝎𝒔 ............................36
3.2.2. Cấu trúc của hệ thống điều khiển ............................................................43
3.2.3. Lựa chọn các hàm Weight .......................................................................45
Kết luận chương 3 .................................................................................................46
CHƯƠNG 4. KẾT QUẢ MÔ PHỎNG .....................................................................47
Kết luận chương 4 .................................................................................................59
KẾT LUẬN VÀ KİẾN NGHỊ...................................................................................60
1. Kết luận .............................................................................................................60
2. Kiến nghị ...........................................................................................................60
CÁC THAM SỐ CỦA DFIM ...................................................................................61
TÀI LIỆU THAM KHẢO .........................................................................................62
5
DANH MỤC HÌNH ẢNH
Hình 1.1: Các loại máy phát điện được sử dụng trong hệ thống phát điện sức gió ..11
Hình 1.2: Các chế độ vận hành của MPKĐBNK và dòng chảy năng lượng tương
ứng………………………………………………………………………………….12
Hình 1.3: Hệ thống máy phát sức gió .......................................................................13
Hình 1.4: Các phương pháp điều khiển MPKĐBNK ...............................................14
Hình 1.5: Sơ đồ khối điều khiển phía máy phát. .......................................................18
Hình 2.1: Biểu diễn LFT trên (a) và dưới (b)............................................................23
Hình 2.2: Cấu trúc hệ thống tương tác ......................................................................29
Hình 2.3: Hệ thống tương tác với các hàm trọng lượng ...........................................30
Hình 2.4: Cấu trúc điều khiển phản hồi tổng quát ....................................................32
Hình 2.5: Điều khiển 𝐻∞ độ nhạy hỗn hợp ............................................................33
Hình 2.6: Điều khiển 𝐻∞ độ nhạy hỗn hợp với các hàm trọng lượng ...................34
Hình 3.1: Biểu diên LFT của hệ ................................................................................43
Hình 3.2: Cấu trúc của hệ kín trong thiết kế 𝐻∞ .....................................................43
Hình 3.3: Cấu trúc điều khiển kín của mạch vòng dòng điện ...................................45
Hình 4.1 cho thấy đáp ứng tần số của hệ thống điều khiển với bộ điều khiển dòng
𝐻∞.............................................................................................................................48
Hình 4.2: cho thấy đáp ứng trong miền thời gian của bộ điều khiển dòng 𝐻∞ ......50
Hình 4.3: cho thấy đáp ứng tần số của hệ thống khi 𝜔𝑚 = 𝜔𝑠 = 110%𝜔𝑛 ..........52
Hình 4.4: Đáp ứng miền thời gian của bộ điều khiển dòng 𝐻∞ ..............................54
Hình 4.5: Đáp ứng tần số của hệ thống .....................................................................56
Hình 4.6: Đáp ứng miền thời gian của bộ điều khiển dòng 𝐻∞ ..............................58
6
DANH MỤC CÁC TỪ VIẾT TẮT
Ý nghĩa
Ký hiệu
BRL
Bổ đề chặn biên (Bounded Real Lemma)
LFT
Biến đổi tách tuyến tính (Linear Fractional Transformation)
LMI
Bất đẳng thức ma trận tuyến tính (Linear Matrix Inequality)
LPV
Hệ có tham số biến đổi tuyến tính (Linear Parameter Varying)
LTI
Hệ tuyến tính bất biến (Linear Time-Invariant)
7
DANH MỤC CÁC KÝ HİỆU
Ký hiệu
𝑐𝑜𝑛𝑣
Ý nghĩa
Tập lồi (convex)
𝐼4
Ma trận đơn vị 4 × 4
𝑍4
Ma trận zero 4 × 4
𝑥, 𝑦, 𝑁, 𝑘
𝐗, 𝐘
in nghiêng, thường hoặc hoa, là các số vô hướng
in đậm, chữ hoa, là các ma trận
𝐑
tập hợp các số thực
𝐍
tập hợp các số tự nhiên
𝐂
tập hợp các số phức
𝐑𝑚
𝐑𝑚×𝑛
tập hợp các vector thực có 𝑚 phần tử
tập hợp các ma trận thực có 𝑚 hàng, 𝑛 cột
𝐒𝑛
tập hợp các ma trận vuông đối xứng bậc 𝑛
𝐒+𝑛
tập hợp các ma trận nửa xác định dương bậc 𝑛
𝑛
𝐒++
tập hợp các ma trận xác định dương bậc 𝑛
∈
phần tử thuộc tập hợp
∃
tồn tại
∀
mọi
≜
ký hiệu là/bởi. Ví dụ 𝑎 ≜ 𝑓(𝑥) nghĩa là “ký hiệu 𝑓(𝑥) bởi 𝑎”.
𝑥𝑖
phần tử thứ 𝑖 (tính từ 1) của vector 𝕩
𝑒𝑥
exp(𝑥)
log(𝑥)
𝑎𝑖𝑗
logarit tự nhiên của số thực dương 𝑥
phần tử hàng thứ 𝑖, cột thứ 𝑗 của ma trận 𝔸
8
MỞ ĐẦU
Tính cấp thiết của đề tài
Hiện nay, trong các nguồn năng lượng sạch, năng lượng tái tạo... thì năng
lượng gió là một lựa chọn có nhiều ưu điểm và ngày càng được khai thác một cách
rộng rãi trên thế giới nói chung và Việt Nam nói riêng. Trong nhiều hệ thống máy
phát điện sức gió các máy điện không đồng bộ nguồn kép (MPĐKĐBNK) được sử
dụng làm máy phát điện do có ưu điểm là phần điều khiển được đặt ở phía rotor vốn
có công suất chỉ bằng khoảng 1/3 so với công suất phát. Vì vậy, kích thước và giá
thành của hệ thống điều khiển thường nhỏ hơn so với các hệ thống sử dụng các loại
máy phát điện khác. Do mô hình của các MPĐKĐBNK là phi tuyến và là hệ có nhiều
đầu vào nhiều đầu ra (MIMO) nên việc điều khiển chúng khá phức tạp. Trong một số
tài liệu, các thành phần tương tác chéo trong mô hình MPĐKĐBNK bao gồm cả tốc
độ góc cơ được loại bỏ nhờ sử dụng các bộ bù chéo. Để tuyến tính hóa mô hình máy
phát điện, tốc độ góc cơ đo được của máy phát có thể được coi là hằng số trong một
chu kỳ lấy mẫu và các bộ điều khiển sẽ được tính toán dựa trên các thông số có sẵn
của MPĐKĐBNK trong mỗi chu kỳ lấy mẫu đó.
Việc tuyến tính hóa bằng cách coi tốc độ góc của máy phát trong một chu kỳ
lấy mẫu và các thông số khác của máy phát là hằng như trên dẫn đến việc làm cho
mô hình của máy phát trở lên rất nhạy cảm với sự thay đổi của các tham số hệ thống,
đặc biệt là sự thay đổi nhanh tương đối của tốc độ góc so với tốc độ xử lý của một hệ
thống có đáp ứng chậm. Bên cạnh đó, trong nhiều công trình nghiên cứu, các tác giả
thường coi tần số góc của điện áp lưới cũng là một hằng số không đổi. Tuy nhiên,
trong thực tế tần số góc của điện áp lưới cũng là một tham số thay đổi tùy theo chất
lượng của hệ thống cung cấp điện. Vì vậy, nếu coi cả tốc độ góc cơ của máy phát và
tần số góc của lưới là các tham số biến đổi theo thời gian thì mô hình của máy phát
trở thành một hệ không dừng và có các bất định tham số.
Đề tài “Nghiên cứu thiết kế bộ điều khiển bền vững cho mạch vòng dòng
điện của hệ thống điều khiển máy điện phát sức gió” nhằm mục tiêu áp dụng các
thuật toán điều khiển hệ thống đa biến tuyến tính, không sử dụng các bộ bù và có thể
đảm bảo sự làm việc ổn định của hệ thống ngay cả khi tốc độ góc cơ của máy phát và
tần số góc của điện áp lưới thay đổi. Như vậy, hệ thống thiết kế sẽ đảm bảo chất lượng
điều khiển ổn định trong toàn bộ dải biến thiên của các tham số nói trên của máy phát
và không nhạy với sự thay đổi của nhiễu điện áp lưới đến toàn bộ hệ thống.
9
Đối tượng nghiên cứu
Đối tượng nghiên cứu của đề tài là các máy phát sức gió sử dụng máy điện
không đồng bộ nguồn kép với tốc độ góc và tần số góc của điện áp lưới thay đổi trong
phạm vi biết trước.
Phạm vi nghiên cứu
* Nghiên cứu lý thuyết điều khiển bền vững trong không gian trạng thái.
* Nghiên cứu tổng hợp bộ điều khiển bền vững đa biến có khả năng kháng nhiễu đầu
vào.
* Áp dụng kết quả nghiên cứu cho một đối tượng cụ thể là máy phát điện không đồng
bộ nguồn kép.
Mục tiêu nghiên cứu của đề tài
* Tiếp tục nghiên cứu và hoàn thiện thuật toán điều khiển cho các hệ thống có tham
số biến đổi.
* Nghiên cứu áp dụng phương pháp thiết kế bộ điều khiển bền vững cho các hệ thống
có nhiều đầu vào, nhiều đầu ra và đánh giá các tương tác của các kênh liên kết chéo
cũng như tính nhạy cảm với các nhiễu đầu vào.
* Kiểm nghiệm thuật toán điều khiển thông qua tính toán trên phần mềm Matlab và
mô phỏng trong môi trường Simulink.
Phương pháp nghiên cứu
* Nghiên cứu lý thuyết cơ bản, mô hình hóa hệ thống, áp dụng các lý thuyết đã phát
triển để thiết kế các bộ điều khiển và đánh giá chất lượng ổn định của
toàn hệ thống.
* Sử dụng các công cụ toán học và phần mềm Matlab để thử nghiệm các thuật toán,
mô phỏng hệ thống. Đánh giá, so sánh các kết quả lý thuyết, kết quả mô phỏng.
Bố cục của luận văn:
Chương I: Tổng quan
Chương II: Tổng hợp bộ điều khiển bền vững
Chương III: Thiết kế bộ điều khiển bền vững cho mạch vòng dòng điện
của máy phát điện không đồng bộ nguồn kép
Chương IV: Mô phỏng hệ thống .
Kết luận và kiến nghị.
10
CHƯƠNG 1. TỔNG QUAN
1.1 Khái quát về năng lượng gió
Năng lượng gió đã nhận được quan tâm nhiều hơn trên thế giới kể từ những năm
1970 khi giá dầu mỏ trên thế giới ngày càng tăng cao. Đặc biệt, sự phát triển năng lượng
gió đã có sự bùng nổ trong những thập kỷ gần đây do yêu cầu về sử dụng năng lượng
sạch, năng lượng tái tạo. Các số liệu thống kê được công bố bởi Hội đồng năng lượng
gió toàn cầu trong tháng 5 năm 2008 đã cho biết dung lượng của các hệ thống máy phát
điện chạy sức gió tại hơn 70 nước trên thế giới đã đạt xấp xỉ 94.000 MW . Chỉ tính riêng
trong Liên minh châu Âu thì dung lượng của các hệ thống phát điện chạy sức gió đã tăng
trưởng 18% trong năm 2007 và đã đạt đến 56.535 MW. Trong khi dung lượng đó ở Mỹ
đã tăng từ khoảng 1.800 MW ở thời điểm năm 1990 tới hơn 16.800 MW ở cuối năm
2007.
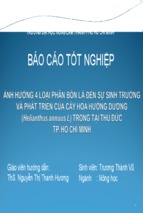
Các hệ thống biến đổi năng lượng gió sử dụng các máy điện gắn với các tuốc-bin
làm máy phát điện được thể hiện trên hình 1.1.
Hệ thống
phát điện sức gió
Máy phát một
chiều
Máy phát xoay
chiều
Máy phát xoay
chiều 1 pha
Máy phát xoay
chiều 3 pha
Máy phát đồng bộ
kích thích vĩnh cửu
Máy phát không
đồng bộ
Máy phát không
đồng bộ 3 pha rotor
lồng sóc
Máy phát không
đồng bộ 3 pha
nguồn kép
Hình 1.1: Các loại máy phát điện được sử dụng trong hệ thống phát điện sức gió
11
S
n
-1
Trên đồng bộ
Chế độ máy phát
0>s>-¥
Trên đồng bộ
Chế độ động cơ
0>s>-¥
ns
0
Dưới đồng bộ
Chế độ máy phát
1>s>0
Dưới đồng bộ
Chế độ động cơ
1>s>0
0
1
m
(a)
Lưới điện
Lưới điện
Rotor
Rotor
Stator
Stator
(b)
(c)
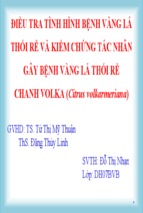
Hình1.2: Các chế độ vận hành của MPKĐBNK và dòng chảy năng lượng tương ứng.
(a) các chế độ vận hành, (b) dòng chảy năng lượng ở chế độ dưới đồng bộ, (c) dòng
chảy năng lượng ở chế độ trên đồng bộ.
Các máy điện xoay chiều được sử dụng trong các hệ thống máy phát sức gió có thể
là loại máy phát đồng bộ kích thích vĩnh cửu, máy phát không đồng bộ rotor lồng sóc và
máy phát không đồng bộ ba pha rotor dây quấn. Ngày nay, các hệ thống tuốc-bin gió
hiện đại thường sử dụng các máy điện không đồng bộ ba pha rotor dây quấn với các bộ
biến đổi được đặt ở phía rotor. Các máy phát như vậy còn được gọi là các máy phát
không đồng bộ nguồn kép (MPKĐBNK). Bên cạnh khả năng làm việc với dải biến thiên
tốc độ lớn xung quanh tốc độ đồng bộ thì một ưu điểm quan trọng của các MPKĐBNK
12
là ở chỗ các bộ biến đổi chỉ cần đảm bảo khả năng làm việc với khoảng 30% công suất
tổng của máy phát. Điều này cho phép giảm được dung lượng của các bộ biến đổi và giá
thành của hệ thống. Chính vì vậy, các MPKĐBNK ngày càng được sử dụng nhiều trong
các hệ thống máy phát điện sức gió mặc dù khó điều khiển hơn so với loại máy phát
đồng bộ kích thích vĩnh cửu và máy phát không đồng bộ rotor lồng sóc.
Đặc tính của MPKĐBNK trong các chế độ làm việc khác nhau và dòng chảy năng
lượng tương ứng được minh họa trên hình 1.2.
1.2 Hệ thống phát điện sức gió sử dụng máy điện không đồng bộ nguồn kép và
các phương pháp điều khiển
Sơ đồ khối tổng thể của một hệ thống biến đổi năng lượng gió được vẽ trên
hình 1.3 Trong đó các cuộn dây stator của MPKĐBNK được nối trực tiếp với lưới. Các
cuộn dây rotor được nối với hai bộ biến đổi, một ở phía rotor được gọi là bộ biến đổi
phía rotor, một ở phía lưới được gọi là bộ biến đổi phía lưới. Hai bộ biến đổi liên hệ với
nhau thông qua mạch một chiều trung gian.
Gió
!
MPK?BNK
?Điện áp
Một chiều
trung gian
m
AC
AC
DC
DC
Bộ điều khiển
phía máy phát
Bộ điều khiển
phía lưới
cos'
Te¤
¤
n
Q ¤g
Điều khiển
góc pitch
u ¤d c
Quản lý
Hệ thống
ĐK turbine
Hình 1.3: Hệ thống máy phát sức gió
Hệ thống điều khiển trên hình 1.3 gồm có hai phần chính: phần điều khiển tuốc
13
bin và phần điều khiển máy phát nguồn kép. Phần điều khiển tuốc bin cung cấp các giá
trị đặt của công suất tác dụng hay mômen điện từ Te* cho phần điều khiển máy phát
nguồn kép. Giá trị đặt này được tính toán dựa trên tốc độ gió đo được và một bảng tra
nhằm ra quyết định lựa chọn công suất đầu ra tối ưu tương ứng với tốc độ quay của tuốc
bin. Một tín hiệu đặt khác là góc điều chỉnh pitch p được đưa trực tiếp tới bộ phận
điều chỉnh góc pitch của các cánh gió để điều khiển tốc độ tuốc bin. Trong khi đó, mục
tiêu của phần điều khiển máy phát nguồn kép là giữ cho các công suất tác dụng và công
suất phản kháng của máy phát ở các giá trị mong muốn.
Điều khiển hệ thống máy phát nguồn kép
Các phương pháp
điều khiển MPKĐBNK
Phương pháp điều
khiển tuyến tính
[18, 44, 49, 65, 67, 69,
72, 75]]
Cuốn chiếu
(backstepping)
[5]
Phương pháp
điều khiển phi
tuyến
Tuyến tính hóa
chính xác
(exact linearization)
[73, 74]]
Tựa phẳng
(flatness based)
[1]
Tựa theo thụ
động
(passivity based)
Hình 1.4: Các phương pháp điều khiển MPKĐBNK
Các thiết kế điều khiển MPKĐBNK kinh điển với các bộ điều khiển kiểu PI được
trình bày trong. Đặc điểm chung của các phương pháp này là có thêm một thành phần
bù kiểu feed-forward ở đầu ra của các bộ điều khiển nhằm loại bỏ các ảnh hưởng của lực
phản điện động của máy. Chi tiết của vấn đề này được trình bày trong. Tuy nhiên, tính
năng của các bộ bù feed-forward phụ thuộc vào độ chính xác của các tham số của
MPKĐBNK nên thường không có được đặc tính làm việc lý tưởng trong thực tế do các
tham số MPKĐBNK có thể bị biến đổi trong quá trình làm việc. Một phương pháp điều
khiển MPKĐBNK kinh điển khác là điều khiển dead-beat được trình bày trong. Tuy
14
nhiên, phương pháp này dựa trên việc giả thiết tần số rotor là hằng trong phạm vi một
chu kỳ trích mẫu T, dẫn đến mô hình gián đoạn của MPKĐBNK là mô hình tuyến tính
hệ số hàm cho phép thiết kế bộ điều khiển tuyến tính. Để tránh việc sử dụng các bộ bù
feed-forward và để đảm bảo chất lượng của hệ thống điều khiển trong một khoảng làm
việc rộng của tốc độ rotor, các phương pháp điều khiển phi tuyến đã được đề nghị áp
dụng cho điều khiển MPKĐBNK. Vấn đề này đã được trình bày trong các tài liệu
Như đã trình bày ở trên, mặc dù hệ thống điều khiển hoàn chỉnh của một tuốc bin
gió phải gồm cả phần điều khiển tuốc bin và phần điều khiển MPKĐBNK, tuy nhiên đề
tài này chỉ tập trung nghiên cứu phần điều khiển MPKĐBNK. Hiện nay đã có nhiều
phương pháp điều khiển MPKĐBNK được thể hiện trên hình 1.4
1.3 . Mô hình và cấu trúc điều khiển hệ thống phát điện sức gió sử dụng Máy phát
không đồng bộ nguồn kép
Mô hình máy điện không đồng bộ nguồn kép
Với điều khiển dòng của MPKĐBNK sử dụng kỹ thuật điều khiển vector thì cần
phải biến đổi các biến sang một hệ tọa độ quay dq . Hệ tọa độ này có thể tựa theo vector
từ thông stator hoặc với vector điện áp lưới. Do MPKĐBNK làm việc song song với lưới
nên cần phải có chức năng hòa đồng bộ. Vì vậy, việc chọn một hệ trục tọa độ dq với
trục d trùng với vector điện áp lưới có thể đem lại một số thuận lợi nhất định. Hệ tọa
độ như vậy sẽ độc lập với các tham số của máy điện và độ chính xác của khâu đo tốc độ
quay. Chính vì các lý do trên, hệ tọa độ dq tựa theo điện áp lưới được lựa chọn để phát
triển mô hình cũng như phát triển các thuật toán điều khiển máy điện không đồng bộ
nguồn kép sau này.
Các phương trình điện áp của stator và rotor có thể được viết như sau:
dΨs
u = Rs i s
dt
s
s
s
s
u rr = Rr i r
r
dΨ r
dt
(1.1)
r
(1.2)
Trong đó, u s và ur là các điện áp stator và rotor, i s và i r là các dòng điện
stator và rotor, Rs and Rr là các điện trở stator và rotor, Ψ s và Ψ r là các từ thông
stator và rotor. Chỉ số s phía trên các đại lượng này mô tả đại lượng đó trên hệ tọa độ
15
, cố định với stator. Chỉ số r phía trên các đại lượng này nhằm mô tả đại lượng đó
trên hệ tọa độ cố định với rotor.
Các từ thông stator và rotor được xác định bởi
= i s Ls i r Lm
= i r Lr i s Lm
Ψs
Ψr
(1.3)
với Lm là hỗ cảm giữa hai cuộn dây stator và rotor và Ls , Lr là các điện cảm
của stator và rotor.
Nếu biểu diễn điện cảm tản phía stator và rotor là Ls và Lr thì các điện cảm
của stator và rotor được tính như sau
= Lm Ls
= Lm Lr
Ls
Lr
Áp dụng các phép biến đổi hệ trục tọa độ (1.1) và (1.2) cho các phương trình (1.3)
và (1.4) ta được các phương trình sau trong hệ tọa độ dq
dΨ s
js Ψ s
dt
dΨ r
= Rr i r
jr Ψ r
dt
= Rs i s
us
ur
(1.4)
với s là tốc độ góc của stator và
r = s m
(1.5)
là tốc độ góc mạch điện rotor và m là tốc độ góc cơ của rotor.
Từ (1.5) và (1.6) ta có
di r
1
=
dt
Lr
R L2
L
1
Rr s 2 m i r m u s
Ls
Ls Lr
Lr
Lm Rs
L
2 js m Ψ s
Ls
Ls
jr
1
Ψr
u
Lr
Lr r
(1.6)
dΨ s
R
RL
= u s s Ψ s s m i r js Ψ s
dt
Ls
Ls
(1.7)
Trong đó, = 1
L2m
là hệ số tản toàn phần.
Ls Lr
16
Viết lại các phương trình (1.6) và (1.7) cho các thành phần d và q của các dòng
điện rotor và từ thông stator dẫn đến:
a 1 a
dird
a
a
a
a 1
=
ird (s m )irq
sd m sq usd
urd (1.8)
dt
Ts
LmTs
Lm
Lm
Lr
Tr
a 1 a
a
a
a
a 1
= (m s )ird
irq m sd
sq
usq
urq
dt
Ts
Lm
LmTs
Lm
Lr
Tr
dirq
dsd Lm
1
=
ird sd s sq usd
dt
Ts
Ts
dsq
dt
=
với a =
(1.10)
Lm
1
irq s sd sq usq
Ts
Ts
1
(1.9)
(1.11)
.
Dạng ngắn gọn của các phương trình (1.8), (1.9), (1.10) và (1.11) kết hợp với
phương trình đầu ra được biểu diễn như sau:
với
y r = i r = ird
T
T
xr = Ar (m )xr Bsus Br ur
(1.12)
y r = Cr xr
(1.13)
x r = ird
T
irq
sd
sq
,
u s = usd
T
usq
,
u r = urd
T
urq
irq .
a 1 a
s
Ts
Tr
a 1 a
s
T
Ts
r
A r ( ) =
Lm
0
Ts
Lm
0
Ts
B u = B s
a
Lm
Br = 0
1
0
0
a
Lm
0
1
17
a
LmTs
a
Lm
1
Ts
s
a 1
Lr
0
0
0
a
Lm
a
LmTs
s
1
Ts
0
a 1
Lr
0
0
(1.14)
(1.15)
,
1 0 0 0
Cr =
0 1 0 0
(1.16)
Mô hình phía lưới
Mạch điện rút gọn của lưới có thể được biểu diễn trên hình 1.5. Bộ biến đổi phía
lưới thường nối với lưới thông qua một bộ lọc gồm điện cảm Lc , tụ C f và điện trở
R f . Điện trở của cuộn kháng Lc được biểu thị bởi Rc .
Mô hình không gian trạng thái của lưới có thể được biểu diễn như sau:
x n = A n x n Bcuc Bnu n
(1.17)
y n = Cn x n
(1.18)
T
T
T
T
với x n = ind inq , u c = ucd ucq , u n = und unq , y n = ind inq ,
1
T
c
An =
s
s
C
B n = nd
1
Cnq
Tc
1
L
Cnq
c
, Bc =
Cnd
0
0
1 0
, Cn =
1
0 1
Lc
BBĐPMP
Te*
-
Qg*
-
PI
PI
ird*
DC-link
urd
Bộ điều
khiển phía
Rotor
irq*
urq
e
DC
j r
uDC
PWM
AC
ird
irq
e jr
2
3
n
m
MPNK
r
isd
Tính
mômen và
công suất
phản
kháng
isq
usd
usq
e j s
2
3
s
Tính góc pha và
điện áp stator
Lưới
Hình 1.5: Sơ đồ khối điều khiển phía máy phát.
Điều khiển phía máy phát
Cấu trúc điều khiển
Bộ điều khiển phía máy phát có nhiệm vụ điều chỉnh công suất tác dụng (có thể
thông qua điều chỉnh mômen điện Te ) và công suất phản kháng Q g (hoặc hệ số công
18
suất cos ).
Trong các hệ thống điều khiển máy điện, các bộ điều khiển dòng đóng vai trò rất
quan trọng vì chúng cung cấp vector điện áp cần thiết cho mạch điện tử công suất. Hơn
nữa, chất lượng của toàn bộ hệ thống điều khiển phụ thuộc chủ yếu vào chất lượng của
các bộ điều khiển dòng. Vì vậy, các hệ thống điều khiển máy điện thường bao gồm một
mạch vòng trong với một bộ điều khiển vector dòng i r và mạch vòng ngoài với các
biến điều khiển khác.
Kết luận chương 1
Chương 1 đã giải quyết được các vấn đề sau:
• Tổng quan về các hệ thống biến đổi năng lượng gió
• Đưa ra đối tượng nghiên cứu là hệ thống phát điện sức gió sử dụng máy điện không
đồng bộ nguồn kép và các phương pháp điều khiển.
Vấn đề đặt ra là cần nghiên cứu áp dụng các thuật toán điều khiển hệ thống đa
biến tuyến tính, không sử dụng các bộ bù và có thể đảm bảo sự làm việc ổn định của
hệ thống ngay cả khi tham số của máy phát thay đổi. Luận văn đề xuất nghiên cứu lý
thuyết điều khiển bền vững trong không gian, kỹ thuật gain schduling cho các hệ
thống có tham số biến đổi tuyến tính, phụ thuộc affine và có thể đo được trong thời
gian thực, từ đó áp dụng kết quả nghiên cứu cho máy phát điện không đồng bộ nguồn
kép.
CHƯƠNG 2. TỔNG HỢP BỘ ĐİỀU KHİỂN BỀN VỮNG
Chương này được dành để trình bày các vấn đề liên quan việc tổng hợp bộ
điều khiển bền vững 𝐻∞ . Nội dung chính của chương được trình bày dựa trên các tài
liệu.
19
- Xem thêm -