Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
Chương 1: PHÂN TÍCH LỰA CHỌN PHƯƠNG ÁN BỐ TRÍ HỆ ĐỘNG LỰC.
1.1/ Khảo sát các đặt tính kỹ thuật cần thiết của tàu mẫu.
1.1.1 Chọn tàu mẫu.
a/ Phân tích các đặc tính của tàu mẫu.
-
Chế độ chạy tự do: Tàu ở trạng thái 1 xuất bến với 0% hàng và 100% dự trữ. Chế
độ hoạt động ở trạng thái này thì tàu chạy với vận tốc tự do, sức cản của tàu là lớn
nhất, chân vịt chạy ở chế độ tự do.
-
Chế độ chạy nặng tải:
+ Ở chế độ này chân vịt phải làm việc ở điều kiện nặng tải, sức cản tác dụng lên
thân tàu lớn, cộng thêm sức cản của lưới khai thác(đối với trạng thái 5)
+ Các trạng thái mà tàu phải chạy ở chế độ nặng tải:
Trạng thái 2 tàu có 100% lượng hàng, 10% dữ trữ và nhiên liệu
Trạng thái 3 tàu 20% hàng ,10% dữ trữ và nhiên liệu, lưới ướt
Trạng thái 4 tàu thu 1 mẻ 0,5 tấn cá, 25% dữ trữ và nhiên liệu, lưới ướt
Trạng thái 5 tàu đang thu lưới hướng ngang tàu, 25% dữ trữ và nhiên liệu.
b/ Chọn tàu mẫu.
Trên cơ sở phân tích các đặc tính làm việc của tàu mẫu, em đưa ra phương án thiết
kế cho đề tài em được giao là mô hình được tham khảo từ tàu mẫu. Tàu mẫu được
tham khảo trong đề tài của em là tàu cá, mang số hiệu TC001-ĐNA do công ty thiết
kế tàu thủy “ Tân Tiến Phong “ thiết kế, lưu trữ ở cục khai thác và bảo vệ nguồn lợi
thủy sản Đà Nẵng.
Bảng 1.1: So sánh tàu tham khảo và tàu thiết kế
STT
Thông số
Tàu mẫu
Tàu thiết kế
So sánh
2
N (CV)
840
800
4%
4
Lpp (m)
19,5
17.5
10%
6
Btk (m)
6,5
5.8
11%
SVTH: Lê Anh Nam
1
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
7
D (m)
2,95
2.6
12%
8
d (m)
2,32
2
14%
10
Cb
0,7
0.69
1%
11
Lượng chiếm nước
211
143.6
30%
Cấp I
Cấp I
Cùng
(T)
14
Vùng hoạt động
Như vậy, theo phân tích em chọn tàu mẫu có các thông số như bản nêu trên.
1.1.2/ Phân tích bố trí hệ động lực của tàu mẫu.
Tàu mẫu chọn phương án bố trí hệ động lực phía đuôi tàu.
a/ Ưu điểm:
-Đảm bảo tính liên tục khi tàu bố trí các khoang để hầm cá , hầm đá ,phụ tùng thiết bị
....không là gián đoạn sức chở
- Bố trí hệ trục ngắn làm giảm tổn hao hiệu suất nâng cao công suất có ích
-Tàu phục vụ mục đích đánh cá nên sẽ làm tăng khả năng khai thác của tàu trong các
trường hợp kéo thả lưới, thu lưới và thu gom cá..
- Nâng cao lợi ích kinh tế giảm giá thành của hệ trục.
b/ Nhược điểm:
- Ổn định dọc của con tàu kém do hệ trục và máy nằm về phía đuôi tàu là mất cân bằng
dọc của tàu
- Tầm nhìn quan sát của thuyền trường giảm vì có phát sinh khoảng cách từ lầu lái ở phái
đuôi tới mũi tàu
- Tàu đóng bằng vỏ gỗ nên kết cấu có độ bền thấp nên phải gia cường mạnh về phía đuôi
tàu để đảm bảo sức bền cho con tàu hoạt động
-Khả năng sinh tồn của tàu sẽ giảm nếu trường hợp tàu 1máy chính và 1 hệ trục khi đó
nếu có sư cố mà ko khắc phục được tàu sẽ khó vượt qua và đây là hạn chế lớn nhất trong
quá trình khai thác của tàu mẫu cần khắc phục.
SVTH: Lê Anh Nam
2
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
1.2/ Phân tích phương án bố trí hệ động lực.
1.2.1/ Các phương án bố trí hệ động lực.
Có 3 phương án bố trí hệ động lực: bố trí phía mũi, lái và đuôi.
-
Phương án 1: Bố trí phía lái.
Ưu điểm: Hệ trục ngắn, thuận tiện trong gia công lắp ráp và tận dụng được dung
tích các khoang chứa. Vì vậy thường được bố trí cho các tàu chở hàng rời đồng nhất
như: chở dầu, than, quặng, container…
Nhược điểm: Diện tích buồng máy chật hẹp, khó bố trí các trang thiết bị, cân bằng
dọc khó hơn và hiện tượng dao động cộng hưởng dễ xảy ra giữa máy chính và chân
vịt, khó quan sát điều khiển tàu nếu cabin máy lái nằm ngay trên buồng máy.
-
Phương án 2: Bố trí phía mũi.
Ưu điểm: Quan sát điều khiển tàu dễ hơn, cho nên được áp dụng cho các tàu lai dắt,
tàu đẩy hoặc tàu đánh cá có boong thao tác phía đuôi tàu.
Nhược điểm: Hệ trục dài hoặc rất dài dẫn đến gia công, lắp ráp phức tạp hơn. Hệ
trục phải đi qua nhiều khoang hàng và vách ngăn choán dung tích khoang hàng, khó
bố trí và kiểm tra trong quá trình vận hành. Cân bằng dọc của tàu khó hơn.
- Phương án 3: Bố trí ở giữa.
Ưu điểm: Buồng máy ở giừa thì dung hòa được các nhược điểm nêu trên, việc cân
bằng tàu dễ dàng hơn. Thường áp dụng cho tàu chở hàng khô hỗn hợp.
Nhược điểm: Hệ trục vẫn phải đi qua các khoang hàng, choán chỗ, phân chia
khoang khó hơn, bóc xếp hàng phiền phức hơn.
b/ Lựa chọn phương án bố trí buồng máy cho tàu thiết kế.
Vậy theo yêu cầu của tàu thiết kế, cũng như phạm vi áp dụng của từng phương
pháp bố trí hệ động lực. Em chọn phương án 1 là bố trí hệ động lực nằm về phía lái
tàu.
1.2.2/ Phân khoang.
a) Xác định khoảng sườn.
Khoảng cách sườn được tính theo Quy phạm, như sau:
SVTH: Lê Anh Nam
3
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
- Khoảng cách của các sườn ngang (s) được tính theo công thức sau đây:
a ≥ L + 20 = 375 (mm).
Với: L = 17,5 (m), chọn a = 400 (mm).
- Khoảng cách giữa các dầm dọc được tính theo điều 5.2.2 của Quy phạm:
S = 550 +2.L = 550+2.17,5 = 585 (mm).
Chọn s = 600 (mm).
b) Tiến hành phân khoang.
Trên cơ sở khoảng cách sườn đã tính toán, chia chiều dài tàu thành khoảng sườn thực,
với khoảng cách sườn tại các khu vực như sau:
-
Chiều dài khoang đuôi: Lđ = 2,8 (m) ( từ sườn 0 đến sườn 7 ).
-
Chiều dài khoang máy: Lmc = 4,8 (m) ( từ sườn 7 đến sườn 19 ).
-
Chiều dài khoang mũi: 5%L < Lm < 5%L+3,05 (m).
Với L=17,5 (m), chọn chiều dài khoang mũi: Lm = 1,2 (m)
Như vậy, chiều dài của khoang cá và khoang đá, sẽ còn:
Lcd=Ltk-Lm-Lmc-Lđ=17,5-1,2-2,8-4,8=8,8(m).
-
Chiều dài khoang cá: bố trí 2 khoang cá.
+ Khoang cá: 3,6(m) mỗi khoang.
Khoang cá 1 ( từ sườn 19 đến sườn 28 )
Khoang cá 2 ( từ sườn 32 đến sườn 41 )
+ Khoang đá: 1,6(m). ( từ sườn 28 đến sườn 32 ).
-
Khoang mũi: 1,2(m) ( từ sườn 41 đến sườn 44 ).
1.3/ Bố trí sơ bộ hệ động lực chính.
Phát thảo sơ bộ vị trí đặt máy – hệ trục:
-
Sơ đồ phân khoang:
SVTH: Lê Anh Nam
4
Đồ án thiết kế hệ động lực tàu
Bố trí sơ bộ buồng máy:
1350
1100
815
-
GVHD: Nguyễn Tiến Thừa
210
383
1710
160
1990
1165
6500
100
120
3437
1100
1895
497
SVTH: Lê Anh Nam
704
461
303
5
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
Chương 2: TÍNH CHỌN CÁC PHẦN TỬ CỦA HỆ ĐỘNG LỰC CHÍNH.
2.1/ Tính lực cản
2.1.1/ Lựa chọn phương pháp tính.
Phương pháp lựa chọn: Oortsmersena.
-
Phạm vi áp dụng: sử dụng cho tàu cá và tàu chạy nhanh.
-
Nội dung phương pháp:
Sức cản tàu cá khi chạy kéo lưới được tính theo phương pháp Oortsmerssen:
R C1.f1 C 2 .f 2 C3 .f 3 C 4 .f 4 .D
1
CF CF ..v 2 .S(kG) [CT8- 61; tr463; 4]
2
Trong đó:
+ Chiều dài tính toán: L D 0,5(L pp L DN )(m) . Do L pp L DN L nên LD 17,5(m)
+ Hệ số Ci ;i 1,2,3,4 được tính theo:
2
L
L
Ci di,0 di,1.lcb d .l di,3 . di,4 . di,5 . D di,6 . D
B
B
2
i,2 cb
2
2
B
B
di,7 .a di,8 .a di,9 . di,10 . di,11.
T
T
2
với:
lcb :Tâm nổi thân tàu với tàu CB > 0.65 tính theo công thức bề thử Wagerningen :
0, 65 CB
0, 65 0, 69
lcb 0, 022 sin
0, 5 0, 022 sin
0, 5 0, 0199
2
0,15
2
0,15
Với : là góc vào nước: 35o
Hệ số di,0…di,11:
SVTH: Lê Anh Nam
1
2
LD 1 35.3,14 19,5
0,9216
B 2 180
6
6
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
I
1
2
3
4
di,0
79,32134
6714,884
-908,444
3012,15
di,1
-0,09287
19,83
2,52704
2,71437
di,2
-0,00209
2,66997
-0,35794
0,25521
di,3
-246,459
-19662
755,1866
-9198,81
di,4
187,1366
14099,9
-48,9395
6886,6
di,5
-1,42893
137,3361
-9,86873
-159,927
di,6
0,11898
-13,3694
-0,77652
16,2362
di,7
0,15727
-4,49852
3,7902
-0,82014
di,8
-0,00064
0,021
-0,01879
0,00225
di,9
-2,52862
216,4492
-9,24399
236,38
di,10
0,50619
-35,076
1,28571
-44,1782
di,11
1,62851
-128,725
250,6491
207,256
Sau khi tính ta có bảng hệ số Ci;i=1,2,3,4:
+ fi ,i 1, 2,3, 4 : được tính theo công thức sau:
m
.Fr 2
9
f1 e
f 2 e m.Fr
f 3 e m.Fr .sin Fr 2
f 4 e m.Fr .cosFr 2
2
2
2
Với: Hệ số m 0,14347.2,1976 0,14347.0, 762,1976 0, 27
Số Froude của tàu: Fr
v
[CT8- 30; tr450; 4]
g.L D
Gia tốc trọng trường g 9,81(m / s 2 )
+ Hệ số sức cản ma sát tính theo ITTC-57:
với: Số Reynol:Re = v.LD/
Độ nhớt động học của nước biển tại 21,11oC:
SVTH: Lê Anh Nam
CF
0,075
log Re 2
2
m2/s-1)
7
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
+ CF : Hệ số sức cản ma sát bổ sung CF CF 0,0004 trong đó:
i
CF 0,00021cho tàu vỏ gỗ
CF 0,00004 cho bánh lái
CF 0,00004 cho ky đứng
CF 0,00008 cho không khí
+ : mật độ nước biển tại 70oF , 101, 76(kg.s 2 / m 4 )
+ Diện tích mặt ướt tàu được tính theo :
2
1
2
1
S 3.223.D 3 0.5402 LD .D 3 3.223.143,6 3 0.5402.17,5.143,6 3 137,87.,m2
Cho dải vận tốc kéo lưới của tàu vs (Hl / h) ta thực hiện tính sức cản tàu khi kéo lưới và
công suất kéo theo các bước sau:
B1: Cho dải vận tốc kéo lưới vs (Hl / h) .
B2: Tính v 0,514vs (m / s) .
B3: Tính số Froude Fr
v
.
g.L D
B4: Tính Fr 2 .
B5,…,B8: Tính giá trị fi f Fr 2 .
B9,…B12: Tính giá trị Ci ( bảng 4 - 3).
B13: Tính tổng Ci .fi ;i 1, 2,3, 4 .
B14: Tính số Reynol:Re = v.LD/
Tính hệ số sức cản ma sát CF f (Re) .
B16: Tính hệ số sức cản ma sát bổ sung CF .
B17: Tính tổng hệ số sức cản ma sát CF CF .
B18: Tính sức cản sóng của tàu R W Ci fi .D(kG)
1
B19: Tính sức cản ma sát của tàu R f .(C F C F )..S.v 2 (kG) .
2
B20: Tính sức cản toàn tàu khi kéo lưới R T R W R f (kG) với RW; Rf là sức cản song và
sức cản ma sát của tàu.
B21: Tính công suất kéo lưới EHP
SVTH: Lê Anh Nam
R T .v
(CV) .
75
8
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
2.1.2/ Tiến hành tính toán.
Vận tốc kéo yêu cầu : Vk = 6 (hl/h). Với Ld = 17,5 (m).
TT
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Đại lượng
tính
Vận tốc tàu
(hl/h)
Vận tốc tàu
(m/s)
Số Froude
(-)
Fr-2
f1
f2
f3
f4
C1
C2
C3
C4
Ký hiệu
Vs
6
7
8
9
10
V
3.084
3.598
4.112
4.626
5.14
Fr
Fr-2
f1
f2
f3
f4
C1
C2
C3
C4
Cf
Cf + Cf
0.235
18.05
0.58
0.01
0.0024
0.01
-0.00492
0.40
-0.19
0.16
0.0009
55054575
0.00228
0.00037
0.00265
Rw
129.95
1571.48
4322.96
8184.50
12744.41
Rf
176.52
235.53
302.44
377.14
459.53
RT
306.47
1807.00
4625.40
8561.64
13203.94
RT
30.65
180.70
462.54
856.16
1320.39
Ci. fi
Ci. fi
Số Renol
Cf
Re
Cf
Cf
Cf + Cf
Giá trị tính
Lực cản
sóng (KG)
Lực cản
ma sát
(KG)
Lực cản
tổng cộng
(KG)
Lực cản
tổng cộng
SVTH: Lê Anh Nam
0.275
0.314
0.353
0.392
13.26
10.15
8.02
6.50
0.67
0.74
0.79
0.82
0.03
0.06
0.11
0.17
0.0064
0.0114
0.0160
0.0196
0.03
0.06
0.11
0.17
-0.00492 -0.00492 -0.00492 -0.00492
0.40
0.40
0.40
0.40
-0.19
-0.19
-0.19
-0.19
0.16
0.16
0.16
0.16
0.0109
0.0301
0.0570
0.0888
64230338 73406100 82581863 91757625
0.00222
0.00218
0.00214
0.00211
0.00037
0.00037
0.00037
0.00037
0.00259
0.00255
0.00251
0.00248
9
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
(KG)
Lực cản
22 tổng cộng
3064.66
18070.03 46253.98 85616.36 132039.41
(KN)
Rt
CS kéo lưới
23
12.60
86.69
253.60
528.08
904.91
(CV)
EHP
Để tính sức cản tàu khi kéo lưới, cũng như công suất kéo cho dải vận tốc kéo lưới của tàu
vs (hl/h).
Bảng tính 2.1: Bảng tính sức cản và công suất máy.
* Giải thích số liệu tính toán:
Theo như bảng số liệu tính toán trên ta có thể thấy:
Khi tàu kéo lưới ở vận tốc kéo thiết kế là Vk, thì máy chính sẽ trích 1 phần nhỏ công suất
của máy để duy trì vận tốc kéo của tàu ( chống lại sức cản vỏ tàu ), phần công suất còn lại
của máy sẽ được chuyển thành lực để kéo lưới.
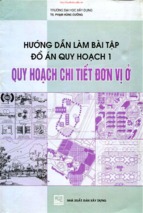
Để trực quan cho những giải thích trên ta có thể xem đồ thị sức cản và công suất kéo của
tàu theo vận tốc kéo của tàu ở đồ thị ........
SVTH: Lê Anh Nam
10
R,EHP
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
1400
R.10^-1 (KG)
EHP (CV)
1200
1000
800
600
400
200
0
6
7
8
9
10
Vs (HL/h)
Hình 2. 1. Đồ thị lực cản và công suất kéo tàu.
2.1.3/ Tính chọn máy.
-
Dựa vào phương án mà đề tài được đưa ra cùng số liệu kết quả của quá trình tính
toán sức cản. Phương án được chọn, là chọn máy của hãng YUCHAI với số hiệu là
YC6T400C.
-
Đặc tính cơ bản của máy:
+ Công suất máy phù hợp với điều kiện của tàu được thiết kế (400-440 CV ).
+ Kích thước của máy phù hợp với buồng máy nhỏ của tàu cá.
+ Số vòng quay và tỷ số truyền của hộp số:
+ Các thông số cụ thể của máy YC6T400C:
Bảng 2.2. Catalog động cơ YC6T400C.
Tên động cơ
Thế hệ động cơ
Số - đường kính - hành trình của
SVTH: Lê Anh Nam
YC6T400C
Động cơ 4 kỳ, kiểu đứng, 6 xylanh – thẳng hàng, làm
mát bằng nước
6x145x165
11
Đồ án thiết kế hệ động lực tàu
xilanh
Tổng dung tích xilanh
Công suất liên tục/tốc độ
Công suất tối đa
Kiểu phun nhiên liệu
Phương thức khởi động
Trọng lượng
Hệ thống làm mát
GVHD: Nguyễn Tiến Thừa
16,35L
294kW(400HP)/1500rpm
323kW(440HP)/1548rpm
Phun trực tiếp
Khởi động điện hoặc khí
1960kG
Làm mát bằng nước
Bảng 2.3. Thông số hộp số sử dụng cho động cơ YC6T400C.
Tên gọi
Kiểu hộp số
Trọng lượng
Tỉ số truyền
Tốc độ quay của trục chân vịt
Chiều quay hộp số
SVTH: Lê Anh Nam
KMH61A
Hộp số thủy lực
78kG
3.43
428
Cùng chiều kim đồng hồ và ngược chiều kim đồng hồ
12
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
2.2) Thiết kế chân vịt.
Thiết kế chân vịt theo chế độ kéo
2.2.1/ Thông số ban đầu.
Bảng 2.5. Thông số thiết kế ban đầu
Thông số
STT
Kí hiệu
Trị số
Đơn vị
1
Chiều dài tàu
L
17,5
(m)
2
Chiều rộng tàu
B
5,8
(m)
3
Chiều cao mạn
T
2,6
(m)
4
Chiều chìm tàu
d
2
(m)
5
Hệ số béo thể tích
CB( )
0,69
6
Hệ số béo sườn giữa
CM( )
0,92
7
Hệ số béo đường nước
CW( )
0,94
8
Hệ số béo lăng trụ
CP(φ)
0,76
9
Lượng chiếm nước
10
Công suất máy chính
11
143,6
(tấn)
Ne
800
(CV)
Số vòng quay máy chính
N
1500
(v/p)
12
Tỉ số truyền của hộp số
i
3.43
13
Vận tốc sơ bộ của tàu
vsb
6
14
Bố trí buồng máy
Phía đuôi
(Hl/h)
2.2.2/ Thiết kế sơ bộ chân vịt.
a/ Chọn sơ bộ và tính toán các thông số của chân vịt.
- Số lượng chân vịt:
Zp=2.
- Series chân vịt:
chân vịt nhóm B-Wageningen.
- Số cánh chân vịt:
4.
- Profil cánh:
dạng profil cánh máy bay.
- Vật liệu chế tạo:
đồng thau.
- Đồ thị sử dụng:
Taylor.
b/ Tính toán các thông số của chân vịt:
SVTH: Lê Anh Nam
13
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
Số vòng quay và tốc độ tịnh tiến chân vịt.
- Sử dụng hộp số thủy lực với hiệu suất hs = (0,95-0,97). Chọn hs =0,95.
- Ta lấy số vòng quay của hộp số là số vòng quay của trục ra của máy chính.
- Số vòng quay đầu ra của hộp số: Nhs= nm/ihs = 1500/3,43 = 437 (v/ph).
( lấy số vòng quay đầu vào hộp số bằng với số vòng quay do máy tạo ra)
- Như ta đã biết, thì tần suất quay của chân vịt bằng 0.98 – 0.99 tần suất quay định mức do
máy truyền đến, vậy ta có số vòng quay trục chân vịt:
Ncv = Nhs.0,98 = 437.0,98 = 428 (v/ph).
- Ta có tốc độ tịnh tiến chân vịt: va = v.(1-w) = 6.(1-0,2) = 4,8 (Hl/h).
Tính toán hệ số lực hút và hệ số dòng theo.
- Áp dụng công thức Keldvil đối với tàu kéo 2 trục chân vịt để tính hệ số dòng theo:
Ta có: 𝑤 =
𝐶𝐵
3
− 0,03 =
0,69
3
− 0,03 = 0,2.
- Áp dụng công thức Heckscher đối với tàu cá lưới kéo ta có:
Hệ số lực hút: 𝑡 = 0,77. 𝜑 − 0,30 = 0,77.0,75 − 0,30 = 0,2775.
Công suất dẫn đến trục chân vịt:
- Phát thảo sơ bộ bộ truyền từ máy chính đến chân vịt:
SVTH: Lê Anh Nam
14
Đồ án thiết kế hệ động lực tàu
1. Máy chính
2. Khớp nối
GVHD: Nguyễn Tiến Thừa
3. Hộp số 4. Máy phát điện
5. Trục trung gian 6. Trục chân vịt 7. Chân vịt
Hình 2.2: Hệ động lực chính.
- Tính toán công suất dẫn đến trục chân vịt:
+ Công thức tính: PD =B.S. hs.PE.
B = 0,97 : hiệu suất gối đỡ.
Trong đó:
S = 0,95 : hiệu suất đường trục
hs = 0,96 : hiệu suất hộp số thủy lực.
PE = 400: công suất của máy.
(CV)
+ Tính toán: PD = 0,97.0,95.0,96.400 = 353,856 (CV).
+ Chuyển đổi sang đơn vị HP: 𝑃𝐷 = 354 ∗
75
76
∗
1000
1025
= 340 (𝐻𝑃).
Tính sơ bộ lực đẩy chân vịt:
Lực đẩy của chân vịt T (KG) trong giai đoạn thiết kế ban đầu tính theo công thức kinh
nghiệm, dựa vào công suất máy chính PD (CV) cung cấp cho chân vịt và điều kiện khai
thác của tàu.
T = (8,5 ÷ 12).PD = 9. 353,856= 3184,704 (kG).
Tính sơ bộ đường kính chân vịt:
Đường kính sơ bộ của chân vịt được xác định theo công thức kinh nghiệm:
D (0,78 0,8). 4
PD
nm
Trong đó: PD = 353,856 (CV) : Công suất dẫn động đến chân vịt.
𝑛𝑐𝑣 =
𝑁𝐶𝑉
60
D 0,78. 4
=
428
60
= 7,1 (v/s) :Số vòng quay chân vịt trong 1 giây.
353,856
2,1 (m).
7,1
Chọn sơ bộ tỷ số mặt đĩa chân vịt:
Tỷ số diện tích mặt đĩa chọn theo điều kiện xâm thực chân vịt của bể thử Wagningen:
SVTH: Lê Anh Nam
15
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
A e (1,3 0,3.Z).T
K
A
(p 0 p d ).D 2
Trong đó:
-
Z = 4 : số cánh chân vịt.
-
D = 2,1 (m) : đường kính chân vịt.
-
T = 3184,704 (KG) : lực đẩy của chân vịt.
-
K = 0,15 : tàu 2 chân vịt.
-
d= 2 (m): chiều chìm thiết kế
-
Độ cao tâm trục chân vịt (h) so với đường cơ sở:
D
2,1
0, 2
0, 2 = 1,23 (m)
2
2
Độ sâu trục chân vịt so với mặt nước:
h
-
Hs = d – h = 2– 1,23= 0,77 (m)
-
Áp suất tĩnh (p0) tính đến điểm trong lòng chất lỏng, ngang trên tâm trục chân vịt,
cách mặt thoáng Hs (m) theo công thức trong cơ học chất lỏng:
p0 = pa + .Hs = 10330 + 1025.0,77 = 11114(KG/m2).
Pa = 10330(KG/m2) : áp suất khí quyển.
= 1025 (kG/m3) : trọng lượng riêng nước biển.
Áp suất hơi bão hòa ở 250C: pd = 335,5(KG/m2)
A e (1,3 0,3.4).3184,704
0,15 0,37
A
(11114 335,5).2,12
Lấy tỷ lệ diện tích mặt đĩa thấp nhất ae = 0,4.
ae =
Từ các đồ thị chuẩn của Wageningen ta chọn chân vịt nhóm B4, tỉ lệ diện tích mặt đĩa
0,4. Tiến hành tính toán, dùng đồ thị Taylor để tính.
Với giả thiết vận tốc từ 6 ÷ 10 (HL/h), dựa vào đồ thị Bp- ( đồ thị bể thử Taylor ) của
chân vịt seri B 4.40 ta tiến hành tính lực đẩy có ích Te:
SVTH: Lê Anh Nam
16
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
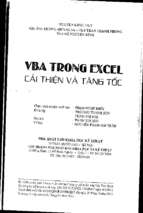
Bảng 2.6 Kết quả tính toán sơ bộ chân vịt
R, T, D, np, H/D
Đại lượng
tính
Vs
Va=Vs.(1-w)
Bp
δopt ( đồ thị )
δ=0,95.δopt
D
H/D ( đồ thị )
ηp ( đồ thị)
T
Te = T(1-t)
Te ( 2 CV )
Đơn vị
hl/h
hl/h
m
KG
KG
KG
1800
6
5
160
435
413
1.41
0.58
0.38
4079.65
2947.55
5895.09
R.10^-1
T.10^-1
D.2.10^3
1600
Kết quả tính
7
8
9
6
6
7
109
78
58
375
325
300
356
309
285
1.42
1.41
1.46
0.56
0.60
0.56
0.43
0.47
0.51
3956.95
3784.41
3650.21
2858.90
2734.24
2637.28
5717.80
5468.48
5274.56
10
8
45
285
271
1.54
0.51
0.53
3414.02
2466.63
4933.26
np.2.10^3
H/D.2.10^3
1400
1200
1000
800
600
400
200
0
6
7
8
9
10
V (HL/h)
Hình 2.2: Đồ thị xác định vận tốc tự do của tàu.
SVTH: Lê Anh Nam
17
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
Thông qua biểu đồ trên ta xác định được vận tốc tự do của tàu là: Vtd = 8,2 (hl/h).
Tương ứng với vận tốc tự do trên, ta cũng xác định được các giá trị tương ứng khác tại đó,
như sau:
Bảng 2.7 Kết quả tính toán chân vịt khi hoạt động ở vận tốc tự do
Ký hiệu
Vs
Va=Vs.(1-w)
Bp
δopt ( đồ thị )
δ=0,95.δopt
D
H/D ( đồ thị )
ηp ( đồ thị)
T
Te = T(1-t)
Te ( 2 CV )
STT
1
2
3
4
5
6
7
8
9
10
11
Kết quả
8.2
6.56
73.14
340
323
1.51
0.51
0.48
3770.67
2724.31
5448.61
Đơn vị
hl/h
hl/h
m
KG
KG
KG
c/ Kiểm tra tính sủi bọt theo tiêu chuẩn Burrill.
Hệ số mặt đĩa đã chọn chỉ phù hợp cho giả thuyết ban đầu khi chưa đủ đặc trưng
hình học của chân vịt. Như vậy, để tránh sủi bọt và khỏi bị xâm thực nhất thiết phải kiểm
tra chân vịt theo tiêu chuẩn tránh sủi bọt.
- Vận tốc các điểm trên cánh tính tại 0,7R:
2..N 0,7
V
.
.D =
2
60
2
V0,7
2
p
2.. 0,7.437
3,37
.
.1,51 24,04(m / s) .
2
60
2
2
V p 0,514.Vt .(1 w) Va .0,514 6,56.0,514 3,37( m / s) .
- Số sủi bọt trung bình:
0,7
pa HS . p v 10330 0,77.1025 335,5
0,356 .
=
2
0,5.101,76.24,042
0,5..V0,7
SVTH: Lê Anh Nam
18
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
Với:
Hs = 0,77 (m).
γ = 1025 (KG/m3).
Pd = 335,5(KG/m2).
𝜌 = 101,76 (𝑘𝑔.
𝑠2
𝑚4
).
- Dựa vào đồ thị Burrill có thể đọc giá trị hệ số lực tương ứng:
T
= 0,14 = f(0,7)
2
0,5..V0,7
.A C
- Diện tích tối thiểu mặt chiếu chân vịt:
AC
2724
T
=
= 0,642(m2).
2
.0,5..V0,7 0,14.0,5.101,76.24,042
Trong khi đó, diện tích thật của mặt chiếu chân vịt là:
H A .D 2
.1,512
A C 1,067 0, 229. . e .
= 1,067 0, 229.0,51 .0, 4.
D A 4
4
= 0,679 (m2).
Với:
H/D = 0,51 .
Ae/A= 0,4.
D = 1,51 (m).
Kết luận: Vậy chân vịt đã thiết kế đảm bảo tính sủi bọt khi hoạt động.
c/ Xây dựng củ chân vịt.
- Đường kính chân vịt: D = 1,508 (m).
-
Đường kính củ chân vịt: dh = 0,16.D = 0,241 (m).
-
Đường kính đầu củ: d1 = 0,18.D = 0,271 (m).
-
Đường kính phía nhỏ: d2 = 0,13.D = 0,196 (m).
-
Chiều dài củ: lh = 0,25.D = 0,377 (m).
-
Chiều dài mủ củ: l2 = dh = 0,241 (m).
-
Độ côn trong: k = 1/15.
SVTH: Lê Anh Nam
19
Đồ án thiết kế hệ động lực tàu
GVHD: Nguyễn Tiến Thừa
-
Bán kính góc lượn cánh ( đầu nhỏ củ ): R1 = 0,03.D = 0,045 (m).
-
Bán kính góc lượn cánh ( đầu lớn củ ): R2 = 0,035.D = 0,053 (m).
Bảng 2.8 Đường bao cánh chân vịt nhóm B.4, tính bằng % so với br0,6.
r/R
b
b1
b2
tmax/D
0,2
76,8
46,9
35,0
0,0406
0,3
85,96
52,64
35,0
0,0359
0,4
93,62
56,32
35,0
0,312
0,5
98,38
57,60
35,5
0,0265
0,6
100
56,08
38,9
0,0218
0,7
98,08
51,40
44,3
0,0171
0,8
90,00
41,65
47,9
0,0124
0,9
72,35
25,35
50,0
0,0077
1
-
-
-
0,0030
d/ Tính toán khối lượng chân vịt.
Theo Kopeetki, khối lượng chân vịt tàu được tính theo công thức sau:
d p e0,6R
Z
3 b 0,6
4
G
.
.D
.
6,
2
2.10
.(0,71
).
0,59..d 2p .l p (kG)
4
4.10
D
D D
Trong đó:
= 8425 (kG/m3) : khối lượng riêng đồng thau.
D = 1,51 (m) : đường kính chân vịt.
Z = 4 : số cánh chân vịt.
SVTH: Lê Anh Nam
20
- Xem thêm -