BỘ GIÁO DỤC & ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH
---------------------------------
ĐỒ ÁN TỐT NGHIỆP
NGÀNH CÔNG NGHỆ KỸ THUẬT ĐIỆN TỬ TRUYỀN THÔNG
ĐỀ TÀI:
ỨNG DỤNG XỬ LÝ ẢNH THIẾT KẾ
THI CÔNG MẠCH CHỐNG TRỘM
THÔNG MINH
GVHD : ThS. Võ Đức Dũng
SVTH: Tăng Nguyễn Công Thiên
MSSV : 13141328
Tp. Hồ Chí Minh - 7/2018
BỘ GIÁO DỤC & ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH
---------------------------------
ĐỒ ÁN TỐT NGHIỆP
NGÀNH KỸ THUẬT ĐIỆN TỬ TRUYỀN THÔNG
ĐỀ TÀI:
ỨNG DỤNG XỬ LÝ ẢNH THIẾT KẾ
THI CÔNG MẠCH CHỐNG TRỘM
THÔNG MINH
GVHD : ThS. Võ Đức Dũng
SVTH: Tăng Nguyễn Công Thiên
MSSV : 13141328
Tp. Hồ Chí Minh - 7/2018
TRƯỜNG ĐH. SƯ PHẠM KỸ THUẬT
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
TP. HỒ CHÍ MINH
ĐỘC LẬP - TỰ DO - HẠNH PHÚC
KHOA ĐIỆN-ĐIỆN TỬ
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP Y SINH
Tp. HCM, ngày 16 tháng 7 năm 2018
NHIỆM VỤ ĐỒ ÁN TỐT NGHIỆP
Họ tên sinh viên:
Chuyên ngành:
Hệ đào tạo:
Khóa:
Tăng Nguyễn Công Thiên
Điện tử công nghiệp
Đại học chính quy
2013
MSSV: 13141328
Mã ngành: 141
Mã hệ:
1
I. TÊN ĐỀ TÀI: ỨNG DỤNG XỬ LÝ ẢNH THIẾT KẾ THI CÔNG MẠCH
CHỐNG TRỘM THÔNG MINH
II. NHIỆM VỤ
1. Các số liệu ban đầu:
Matlab 2017a.
Sử dụng Webcam Logitech.
Kit điều khiển chính: Arduino Uno R3, Servo SG90, Module Sim 800A, Nguồn tổ
ong 10V-5A, Chuông, 2 Led đơn.
2. Nội dung thực hiện:
Để tài thực hiện nội dung phát hiện người và nhận diện khuôn mặt với đầu vào là
hình ảnh lấy được từ webcam, kết quả sẽ được gửi qua arduino để điều khiển Servo
SG90, Module Sim 800A, Chuông, 2 Led đơn. Nhóm sẽ thực hiện các nôi dung như
sau:
Tìm hiểu về Matlab.
Tìm hiểu về Arduino Uno R3.
Cài đặt thưc viện cho Arduino và các liên kết giữa Matlab và Arduino.
Tìm hiểu các thuật toán nhận diện, phát hiện người và khuôn mặt.
Xây dựng quá trình xử lý ảnh đầu vào.
Xây dựng hệ thống phát hiện người và nhận diện khuôn mặt đồng thời gửi dữ liệu
thu được qua Arduino.
Xây dựng chương trình điều khiển servo SG90, Module Sim 800A, chuông, 2 Led
đơn.
Đánh giá kết quả thực hiện.
III. NGÀY GIAO NHIỆM VỤ:
21/03/2018
IV. NGÀY HOÀN THÀNH NHIỆM VỤ: 05/07/2018
V. HỌ VÀ TÊN CÁN BỘ HƯỚNG DẪN:
ThS. Võ Đức Dũng
CÁN BỘ HƯỚNG DẪN
BM. ĐIỆN TỬ CÔNG NGHIỆP - Y SINH
TRƯỜNG ĐH. SƯ PHẠM KỸ THUẬT
TP. HỒ CHÍ MINH
KHOA ĐIỆN-ĐIỆN TỬ
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
ĐỘC LẬP - TỰ DO - HẠNH PHÚC
Tp.HCM, ngày 19 tháng 03 năm 2018
LỊCH TRÌNH THỰC HIỆN ĐỒ ÁN TỐT NGHIỆP
Họ tên sinh viên : Tăng Nguyễn Công Thiên ..................................................................
Lớp:13141DT3B .......................................................... MSSV:13141328 .......................
Tên đề tài: ỨNG DỤNG XỬ LÝ ẢNH THIẾT KẾ THI CÔNG MẠCH CHỐNG
TRỘM THÔNG MINH
Tuần/ngày
Nội dung
1
(19-25/3)
Gặp GVHD để phổ biến quy định thực hiện,
chọn đề tài, tên đề tài, thời gian làm việc.
Duyệt đề tài.
Viết đề cương cho đề tài.
2
(26/3-1/4)
Tìm hiểu hoạt động và các kiến thức liên quan
tới Arduino và Matlab.
3
(2/4-8/4)
4
(9/4-15/4)
Cài đặt Matlab, kết nối Arduino với Matlab.
5
(16/4-22/4)
6
(23/4-29/4)
Xây dựng hệ thống nhận diện và phát hiện
chuyển động con người.
Xây dựng hệ thống nhận diện và so sánh
khuôn mặt
Tiến hành xây dựng cơ sở dữ liệu để lưu giữ
khuôn mặt
Lập trình Arduino với các chân I/O để nhúng
dữ liệu.
Thiết kế sơ đồ khối giải thích chức năng các
khối của kết nối ngoại vi.
Tính toán số liệu.
7
(30/4-6/5)
8
(7/5-13/5)
Lập trình và xây dựng chương trình cho xử lý
hình ảnh đầu vào trên Matlab.
9
(14/5-20/5)
Thi công mô hình.
Lắp đặt và kết nối các thiết vị ngoại vi.
10
(21/5-28/5)
Kiểm tra lỗi và chạy thử chương trình trên mô
hình hoàn chỉnh.
Viết báo cáo hoàn chỉnh.
Xác nhận
GVHD
11
(29/5-3/6)
Hoàn thiện chính sửa báo cáo gửi cho GVHD
để xem xét và góp ý lần cuối.
12
(4/6-11/6)
Nộp quyển báo cáo hoàn chỉnh và làm slide
powerpoint báo cáo.
GV HƯỚNG DẪN
(Ký và ghi rõ họ và tên)
ii
LỜI CAM ĐOAN
Đề tài này là do nhóm sinh viên Tăng Nguyễn Công Thiên tự thực hiện, dựa vào một số
tài liệu trước đó và không sao chép từ tài liệu hay công trình đã có trước đó.
Người thực hiện đề tài
Tăng Nguyễn Công Thiên
iv
LỜI CẢM ƠN
Trong thời gian thực hiện đề tài, những người thực hiện được sự giúp đỡ của gia
đình, quý thầy cô và bạn bè nên đề tài đã được hoàn thành. Những người thực hiện xin
chân thành gửi lời cảm ơn đến:
Thầy Võ Đức Dũng, giảng viên trường Đại Học Sư Phạm Kỹ Thuật Tp.HCM đã
trực tiếp hướng dẫn và tận tình giúp đỡ tạo điều kiện để nhóm có thể hoàn thành tốt đề
tài.
Những người thực hiện cũng xin chân thành cám ơn đến các thầy cô trong khoa
Điện - Điện tử của trường Đại Học Sư Phạm Kỹ Thuật Tp.HCM đã tận tình dạy dỗ, chỉ
bảo, cung cấp cho những người thực hiện những kiến thức nền, chuyên môn làm cơ sở để
hoàn thành đề tài này.
Cảm ơn gia đình đã động viên và luôn luôn bên cạnh trong những lúc khó khăn
nhất.
Xin gửi lời cảm ơn đến những người bạn sinh viên khoa Điện-Điện tử đã giúp đỡ
những người thực hiện đề tài để có thể hoàn thành tốt đề tài này.
Xin chân thành cảm ơn!
Người thực hiện đề tài:
Tăng Nguyễn Công Thiên
v
MỤC LỤC
Trang bìa .................................................................................................................... i
Nhiệm vụ đồ án ........................................................................................................ ii
Lịch trình thực hiện đồ án tốt nghiệp ...................................................................... iii
Cam đoan ................................................................................................................ iv
Lời cảm ơn ................................................................................................................ v
Mục lục .................................................................................................................... vi
Liệt kê hình vẽ ......................................................................................................... ix
Liệt kê bảng vẽ ........................................................................................................ xi
Tóm tắt ................................................................................................................... xii
CHƯƠNG 1. TỔNG QUAN ............................................................................ 1
1.1 LÝ DO CHỌN ĐỀ TÀI ...................................................................................... 1
1.2 MỤC TIÊU ......................................................................................................... 2
1.2.1 Mục tiêu......................................................................................................... 2
1.2.2 Giới hạn ......................................................................................................... 2
1.3 BỐ CỤC ĐỒ ÁN TỐT NHIỆP ........................................................................... 2
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT ................................................................ 4
2.1 GIỚI THIỆU VỀ HỆ THỐNG XỬ LÝ ẢNH .................................................... 4
2.1.1 Phần thu nhận ảnh (Image Acquisiton) ......................................................... 5
2.1.2 Tiền xử lý (Image Processing) ...................................................................... 6
2.1.3 Phân đoạn (Segmentation) hay phân vùng ảnh ............................................. 6
2.1.4 Biểu diễn ảnh (Image Representation) .......................................................... 6
2.1.5 Nhận dạng và nội suy (Image Recognition and Interpretation) .................... 6
2.1.6 Cơ sở tri thức ................................................................................................. 7
2.1.7 Các thành phần cơ bản của hệ thống ............................................................ 7
2.2 NHỮNG VẤN ĐỀ CƠ BẢN TRONG XỬ LÝ ẢNH ........................................ 8
2.2.1 Điểm ảnh (Picture Element) .......................................................................... 8
2.2.2 Độ phân giải của ảnh ..................................................................................... 8
2.2.3 Mức xám của ảnh .......................................................................................... 9
2.2.4 Định nghĩa ảnh số .......................................................................................... 9
vi
2.3 GIỚI THIỆU KHÁI QUÁT VỀ CÁC LINH KIỆN SỬ DỤNG TRONG THIẾT
KẾ, THI CÔNG ĐỀ TÀI .......................................................................................... 9
2.3.1 Mạch Arduino Uno R3 .................................................................................. 9
2.3.2 Tổng quan về động cơ Servo....................................................................... 14
2.3.3 Tổng quan về Buzzer................................................................................... 14
2.3.4 Module SIM 800A ...................................................................................... 15
CHƯƠNG 3. TÍNH TOÁN VÀ THIẾT KẾ. ................................................ 16
3.1 TỔNG QUAN CÁC KỸ THUẬT NHẬN BIẾT MÀU DA DỰA TRÊN TÍNH
CHẤT ĐIỂM ẢNH ................................................................................................ 16
3.1.1 Giới thiệu ..................................................................................................... 16
3.1.2 Không gian màu sử dụng cho mô hình hóa màu da .................................... 16
3.1.2.1 Không gian màu RGB ............................................................................ 17
3.1.2.2 Không gian RGB chuẩn hóa .................................................................. 17
3.1.2.3 Không gian màu HIS, HSV, HSL .......................................................... 18
3.1.2.4 Không gian màu HIS ............................................................................. 18
3.1.2.5 Không gian màu HSV ............................................................................ 19
3.1.2.6 Không gian màu HSL ............................................................................ 20
3.1.2.7 Không gian màu TSL ............................................................................. 21
3.1.2.8 Không gian màu Y
......................................................................... 21
3.1.2.9 Các hệ tọa độ không gian màu khác ...................................................... 22
3.1.3 Mô hình hóa màu da .................................................................................... 22
3.1.3.1 Xác đinh ngƣỡng cụ thể một điểm ảnh là màu da ................................. 22
3.1.3.2 Phƣơng pháp mô hình hóa màu da sử dụng phân phôi không tham số . 23
3.1.3.3 Bảng tra cứu chuẩn cứu (LUT – Lookup Table) ................................... 23
3.1.3.4 Phân lớp Bayes (bayes Classifier) ......................................................... 24
3.1.3.5 Tổng kết phƣơng pháp không tham số................................................... 25
3.1.3.6 Mô hình hóa phân phối màu da có tham số ........................................... 25
3.1.3.7 Mô hình dựa trên phân phối Gauss đơn ................................................. 26
3.1.3.8 Mô hình kết hợp trên dựa trên phân phối Gauss .................................... 26
3.1.3.9 Đa phân phối Gauss ............................................................................... 27
3.1.3.10 Tổng kết các phƣơng pháp mô hình hóa theo tham số ........................ 27
3.1.4 So sánh kết quả các mô hình ....................................................................... 27
3.1.5 Đánh giá phƣơng pháp ................................................................................ 29
vii
3.1.6 Chọn lựa không gian màu và phƣơng pháp mô hình hóa dùn để nhận biết
màu da cho đồ án .................................................................................................. 29
3.2 PHÂN TÍCH THÀNH PHẦN CHÍNH PCA ................................................... 30
3.2.1 Tổng quan về phƣơng pháp PCA ................................................................ 30
3.2.1.1 Giới thiệu ............................................................................................... 30
3.2.1.2 Ý tƣởng .................................................................................................. 30
3.2.2 Trích chọn đặc trƣng khuôn mặt ngƣời dựa trên phƣơng pháp PCA .......... 34
3.2.2.1 Chuyển đổi ảnh ...................................................................................... 34
3.2.2.2 Tính khuôn mặt ngƣời trung bình .......................................................... 35
3.2.2.3 Trừ mỗi ảnh cho mặt trung bình ............................................................ 35
3.2.2.4 Xây dựng ma trận hợp phƣơng sai ......................................................... 35
3.2.2.5 Phép chiếu .............................................................................................. 36
3.3 PHÂN TÍCH HOG ........................................................................................... 37
3.3.1 Giới thiệu ..................................................................................................... 37
3.3.2 Chuẩn hóa hình ảnh trƣớc khi xử lý ............................................................ 38
3.3.3 Tính toán gradient ....................................................................................... 38
3.3.4 Lấy votes trong mỗi cell .............................................................................. 39
3.3.5 Chuẩn hóa các block ................................................................................... 40
3.3.6 Sử dụng trong bài toán object recognition .................................................. 40
3.3 KẾT NỐI VỚI THIẾT BỊ NGOẠI VI ............................................................. 41
3.4.1 Khối xử lý trung tâm ................................................................................... 42
3.4.2 Khối Module Sim 800A .............................................................................. 42
3.4.3 Khối động cơ servo ..................................................................................... 43
3.4.4 Khối hiển thị và báo động ........................................................................... 44
3.4.5 Khối nguồn .................................................................................................. 45
3.4.6 Sơ đồ nguyên lý hệ thống ngoại vi .............................................................. 46
CHƯƠNG 4. THI CÔNG HỆ THỐNG ....................................................... 47
4.1 GIỚI THIỆU ....................................................................................................... 47
4.2 THI CÔNG HỆ THỐNG .................................................................................... 47
4.2.1 Hệ thống nhận hiện chuyển động ................................................................ 47
4.2.1 Hệ thống nhận diện khuôn mặt ................................................................... 50
4.2.2.1 Lƣu đồ giải thuật của hệ thống nhận diện khuôn mặt ............................ 50
4.2.2.2 Lƣu đồ giải thuật của hệ thống huấn luyện ............................................ 51
4.2.2.3 Yêu cầu về dữ liệu ảnh ........................................................................... 52
viii
4.2.2.4 Chuẩn hóa ảnh đầu vào .......................................................................... 53
4.2.2.5 Trích xuất đặc trƣng của khuôn mặt ...................................................... 53
4.2.2.6 Xuất kết quả ........................................................................................... 54
4.2.3 Hệ thống cảnh báo ....................................................................................... 55
4.3 GIỚI THIỆU CHƢƠNG TRÌNH ....................................................................... 57
4.3.1 Hệ thống phát hiện chuyển động ................................................................. 57
4.3.2 Hệ thống nhận diện khuôn mặt ................................................................... 58
4.4 ĐÓNG GÓI VÀ THI CÔNG MÔ HÌNH ........................................................... 62
4.4.1 Đóng gói bộ điều khiển ............................................................................... 62
4.4.1 Thi công mô hình ........................................................................................ 63
CHƯƠNG 5. KẾT QUẢ_NHẬN XÉT_ĐÁNH GIÁ ................................... 65
5.1 KẾT QUẢ. .......................................................................................................... 65
5.2 NHẬN XÉT – ĐÁNH GIÁ ................................................................................ 76
CHƯƠNG 6. KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN. ........................... 77
6.1 KẾT LUẬN ........................................................................................................ 77
6.2 HƢỚNG PHÁT TRIỂN ..................................................................................... 78
TÀI LIỆU THAM KHẢO ............................................................................. 79
PHỤ LỤC………………………….. ............................................................. 80
ix
LIỆT KÊ HÌNH VẼ
Hình
Trang
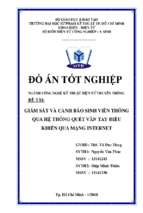
Hình 2.1 Các bước cơ bản trong xử lý ảnh ................................................................... 5
Hình 2.2 Các thành phần chính cảu hệ thống xử lý ảnh ............................................... 7
Hình 2.3 Arduino UNO R3 .......................................................................................... 10
Hình 2.4 Sơ Đồ Chân Arduino UNO R3 ...................................................................... 10
Hình 2.5 Động cơ Servo ................................................................................................ 14
Hình 2.6 Buzzer ............................................................................................................ 14
Hình 2.7 Module Sim 800A .......................................................................................... 15
Hình 3.1 Không gian màu RGB .................................................................................... 17
Hình 3.2 Không gian màu HSV .................................................................................... 19
Hình 3.3 Ý tưởng chính của PCA ................................................................................. 34
Hình 3.4 Biểu đồ dựa trên Gy,Gx .................................................................................. 39
Hình 3.5 Các cell trong một block................................................................................. 40
Hình 3.6 Sơ đồ kết nối ngoại vi .................................................................................... 41
Hình 3.7 Module Sim 800A .......................................................................................... 42
Hình 3.8 Sơ đồ nguyên lý kết nối Module Sim 800A vào Arduino Uno R3 ................ 43
Hình 3.9 Động cơ Servo ................................................................................................ 43
Hình 3.10 Sơ đồ nguyên lý kết nối Arduino Uno R3 với động cơ Servo ..................... 44
Hình 3.11 Sơ đồ kết nối Arduino Uno R3 với Buzzer .................................................. 45
Hình 3.12 Nguồn tổ ong 12V 5A .................................................................................. 46
Hình 3.13 Nguồn tổ ong 5V 4A .................................................................................... 46
Hình 3.14 Sơ đồ nguyên lý hệ thống ngoại vi............................................................... 46
Hình 4.1 Lưu đồ của hệ thống nhận diện chuyển động ................................................ 47
Hình 4.2 Lưu đồ đưa hình ảnh vào hệ thống phát hiện chuyển động ........................... 48
Hình 4.3 Lưu đồ của nhận diện chuyển động ............................................................... 49
Hình 4.4 Hệ thống nhận diện có chuyển động và khoanh vùng chuyển động .............. 49
Hình 4.5 Lưu đồ của hệ thống nhận diện khuôn mặt..................................................... 50
Hình 4.6 Lưu đồ của hệ thống huấn luyện .................................................................... 51
Hình 4.7 Một số ảnh mẫu trong cơ sở dữ liệu ............................................................... 52
Hình 4.8 Lưu đồ tiến trình............................................................................................. 53
Hình 4.9 Lưu đồ hệ thống cảnh báo chuyển động ........................................................ 55
Hình 4.10 Lưu đồ nhận diện khuôn mặt kết hợp với thiết bị ngoại vi .......................... 56
Hình 4.11 Giao diện chính của hệ thống chống trộm thông minh ................................ 57
ix
Hình 4.12 Giao diện chính của hệ thống phát hiện chuyển động ................................. 58
Hình 4.13 Giao diện chính của hệ thống phát hiện chuyển động khi đang hoạt động . 58
Hình 4.14 Giao diện chính của hệ thống nhận diện khuôn mặt .................................... 59
Hình 4.15 Thêm ảnh cho cơ sở dữ liệu ......................................................................... 59
Hình 4.16 Huấn luyện cho cơ sở dữ liệu ....................................................................... 60
Hình 4.17 Tiến hành so sánh khuôn mặt với ảnh trong cơ sở dữ liệu .......................... 60
Hình 4.18 Cho phép xóa ảnh trong cơ sở dữ liệu .......................................................... 61
Hình 4.19 Các khuôn mặt có sẵn trong cơ sở dữ liệu .................................................... 61
Hình 4.20 Xóa tất cả ảnh trong cơ sở dữ liệu ............................................................... 62
Hình 4.21 Sơ đồ bố trí linh kiện mặt trước mô hình ..................................................... 62
Hình 4.22 Hình dạng mặt bên mô hình ......................................................................... 63
Hình 4.23 Hình dạng mặt trên mô hình ......................................................................... 64
Hình 5.1 Phát hiện chuyển động người ở phía trước ..................................................... 65
Hình 5.2 Phát hiện chuyển động người ở phía sau ........................................................ 66
Hình 5.3 Phát hiện chuyển động người khi đang cúi xuống.......................................... 66
Hình 5.4 Hệ thống cảnh báo gửi tin nhắn đến cho gia chủ ............................................ 67
Hình 5.5 Đèn và chuông hoạt động khi có chuyển động ............................................... 67
Hình 5.6 Ảnh chụp lại từ camera trong điều kiện ánh sáng yếu ................................... 68
Hình 5.7 Giao diện chính của hệ thống nhận diện khuôn mặt ...................................... 68
Hình 5.8 Tiến hành thêm hình ảnh vào kho lưu trữ ...................................................... 69
Hình 5.9 Chọn thiết bị để quét môi trường ................................................................... 69
Hình 5.10 Chọn thiết bị để quét môi trường ................................................................. 70
Hình 5.11 Phát hiện ra khuôn mặt ................................................................................. 70
Hình 5.12 Yêu cầu nhập tên .......................................................................................... 71
Hình 5.13 Huấn luyện hệ thống..................................................................................... 71
Hình 5.14 Đang tiến hành huấn luyện hệ thống ............................................................ 72
Hình 5.15 Đã hoàn tấc huấn luyện ................................................................................ 72
Hình 5.16 Tiến hành so sánh khuôn mặt ....................................................................... 73
Hình 5.17 Phát hiện ra khuôn mặt có sẵn trong cơ sở dữ liệu ....................................... 73
Hình 5.18 Cửa mở ra trong 6 giây sau đó tự động đóng lại .......................................... 74
Hình 5.19 Phát hiện ra khuôn mặt không có trong cỡ sở dữ liệu.................................. 74
Hình 5.20 Đèn cảnh báo sáng lên kèm theo chuông ..................................................... 75
x
LIỆT KÊ BẢNG
Bảng
Trang
Bảng 2.1 Các thông số của Arduino UNO R3 ...................................................... 11
Bảng 3.1 Kết quả nhận biết đúng sai của các phương pháp ........................... 28
xi
TÓM TẮT
Hiện nay, hệ thống chống trộm ngày càng phổ biến và được tích hợp thêm nhiều các
thiết bị điện tử để nâng cao tính hiệu quả của hệ thống. Vì thế hệ thống chống trộm ngày
càng được ứng dụng nhiều hơn vào thực tiễn đời sống như không cho người lạ xâm nhập,
bảo vệ tài sản,… đã được đưa vào các hộ gia đình, công ty, trường học,...
Với mục đích muốn tiếp cận với các công nghệ đang phát triển trên. Vì vậy, nhóm
thực hiện đồ án với mong muốn chế tạo ra mô hình chống trộm sử dụng xử lý ảnh kết
hợp với sử dụng kit Arduino được giám sát bằng máy tính thông qua Laptop và tin nhắn
trong đó bao gồm:
Hệ thống có các chức năng như sau:
Hệ thống chính gồm có hai phần
Nhận diện được chuyển động người trong khu vực có camera quan sát và
đưa ra cảnh báo qua tin nhắn.
Nhận diện khuôn mặt và so sánh khuôn mặt đã quét với kho dữ liệu để đưa
ra hướng xử lý mở cửa hay không.
Hệ thống mở rộng bao gồm:
Hệ thống điều khiển thiết bị từ xa thông qua Internet, hiển thị tất cả thông tin
mà camera thu được vào thiết bị di động.
Mô hình sử dụng kit Arduino Uno R3 làm vi điều khiển trung tâm để điều khiển các
module mở rộng như Module Sim 800A, Buzzer, Servo.
Đóng mở cửa bằng cách sử dụng động cơ Servo. Người dùng tương tác sử dụng
thông qua camera được đặt sẵn.
Hệ thống cảnh báo bằng Module Sim 800A gửi tin nhắn cảnh báo khi có người lạ
đột nhập.
xiii
CHƯƠNG 1. TỔNG QUAN
CHƯƠNG 1
TỔNG QUAN
1.1
LÝ DO CHỌN ĐỀ TÀI
Tình hình an ninh trật tự đang là vấn đề nhức nhối của toàn xã hội, đặt biệt là vấn đề
trộm cắp tài sản tại tư gia khiến cho gia chủ phải tốn rất nhiều thời gian và công sức trong
việc bảo vệ tài sản
Dù ở mức độ trộm cắp nào đi chăng nữa cũng để lại là những hậu quả ảnh hưởng
trực tiếp cho gia chủ. Và một trong những nguyên nhân chủ yếu của nạn trộm cắp chính
là an ninh lỏng lẻo giúp kẻ trộm có cơ hội ra tay. Hiện nay khóa đang là hình thức được
sử dụng thông dụng nhất. Tuy nhiên những tên trộm hoàn toàn có thể bẻ, phá được khóa,
thậm chí là khóa số điện tử. Do đó cần phải có những thiết bị báo trộm, vừa để chủ nhà
nhận biết được có kẻ trộm đột nhâp, vừa để tên trộm khi biết đã bị phát hiện sẽ hoảng
loạn sẽ phải quay đầu bỏ chạy ngay. Với những ngôi nhà thông minh hay căn hộ chung
cư, thiết bị báo trộm lại càng cần thiết.
Chính vì cần có biện pháp hiệu quả hơn trong vấn đề an ninh, phòng chống những
rủi ro có thể xảy ra nên nhóm sinh viên chúng em chọn đề tài “Ứng dụng xử lý ảnh thiết
kế thi công mạch chống trộm thông minh.” để làm đồ án tốt nghiệp.
Nhằm khắc phục một phần và ngăn ngừa những hậu quả nêu trên, nhóm sinh viên
chúng em chọn đề tài “Ứng dụng xử lý ảnh thiết kế thi công mạch chống trộm thông
minh” để làm đồ án tốt nghiệp.
Đây là một đề tài không quá mới mẻ, đã được nghiên cứu nhiều trong các đề tài
trước đây. Và kết quả cho thấy rằng độ chính xác nằm ở mức trung bình . Đề tài đã khắc
phục những hạn chế như vẫn có thể so sánh liên tục với những kho ảnh đã lưu trữ, cảnh
báo cho người dùng … nhằm tăng độ chính xác trong việc phát hiện có kẻ lạ.
1.2
MỤC TIÊU VÀ GIỚI HẠN
1.2.1 Mục tiêu
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH
1
CHƯƠNG 1. TỔNG QUAN
Thiết kế và thi công được hệ thống chống trộm thông minh thông qua quá trình xử
lý ảnh nhận diện chuyển động và nhận dạng khuôn mặt để cảnh báo bằng tin nhắn SMS
và báo động đồng thơi đóng mở cửa.
1.2.2 Giới hạn
Đặc tính của hệ thống xử lý ảnh thông thường bị ảnh hưởng bởi nhiều yếu tố. Trong
điều kiện thực tế cho phép nhóm thực hiện đề tài trong một số điều kiện giới hạn sau:
Điều kiện thu nhận hình ảnh ngày và đêm, trong điều kiện ánh sáng ổn định.
Khuôn mặt không trang điểm hoặc bị biến dạng.
Không thể xác định được mắt khi khuôn mặt nghiêng, xoay trái, xoay phải một góc
lớn hơn 45 độ, cúi xuống hoặc ngước lên một góc lớn hơn 300 độ.
Khoảng cách từ camera đến đối tượng dưới 1.2 mét, trên khoảng cách này thì việc
nhận dạng sẽ không được chính xác.
Chưa xây dựng app android để người dùng có khả năng quản lý hệ thống từ xa.
1.3
BỐ CỤC ĐỒ ÁN TỐT NGHIỆP
Đồ án tốt nghiệp có bố cục được thể hiện như sau:
Chương 1: Tổng quan
Giới thiệu và nêu lý do chọn đề tài.
Mục tiêu và giới hạn.
Trình bày bố cục đồ án.
Chương 2: Cơ sở lý thuyết
Giới thiệu về hệ thống xử lý ảnh.
Những vấn đề trong hệ thống xử lý ảnh.
Giới thiệu khái quát về các linh kiện sử dụng trong thiết kế, thi công đề tài.
Chương 3: Tính toán thiết kế
Tổng quan các kỹ thuật nhận biết màu da dựa trên tính chất điểm ảnh.
Phân tích thành phần chính bằng PCA.
Phân tích HOG.
Kết nối với thiết bị ngoại vi.
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH
2
CHƯƠNG 1. TỔNG QUAN
Chương 4: Thi công và giới thiệu chương trình
Giới thiệu.
Thi công hệ thống.
Giới thiệu chương trình.
Đóng gói và thi công mô hình.
Chương 5: Kết quả_Nhận xét_Đánh giá
Kết quả.
Nhận xét_Đánh giá.
Chương 6: Kết Luận Và Hướng Phát Triển
Kết luận.
Hướng phát triển.
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH
3
CHƢƠNG 2. CƠ SỞ LÝ THUYẾT
CHƢƠNG 2
CƠ SỞ LÝ THUYẾT
2.1
GIỚI THIỆU VỀ HỆ THỐNG XỬ LÝ ẢNH
Xử lý ảnh là một lĩnh vực mang tính khoa học và công nghệ. Nó là một ngành khoa
học mới mẻ so với nhiều ngành khoa học khác nhưng tốc đó phát triển của nó rất nhanh,
kích thích các trung tâm nghiên cứu, ứng dụng, đặc biệt là máy tính chuyên dụng riêng
cho nó.
Xử lý ảnh là kỹ thuật áp dụng trong việc tăng cường và xử lý các ảnh thu nhận từ
các thiết bị như camera, webcam… Do đó, xử lý ảnh đã được ứng dụng và phát triển
trong rất nhiều lĩnh vực quan trọng như:
Trong lĩnh vực quân sự: xử lý và nhận dạng ảnh quân sự.
Trong lĩnh vực giao tiếp người máy: nhận dạng ảnh, xử lý âm thanh, đồ họa.
Trong lĩnh vực an, bảo mật: nhận diện khuôn mặt người, nhận diện vân tay, mẫu
mắt, …
Trong lĩnh vực giải trí: trò chơi điện tử.
Trong lĩnh vực y tế: Xử lý ảnh y sinh, chụp X quang, MRI,…
Các phương pháp xử lý ảnh bắt đầu từ các ứng dụng chính: nâng cao chất lượng và
phân tích ảnh. Ứng dụng đầu tiên được biết đến là nâng cao chất lượng ảnh báo được
truyền từ Luân đôn đến New York từ những năm 1920. Vấn đề nâng cao chất lượng ảnh
có liên quan tới phân bố mức sáng và độ phân giải của ảnh. Việc nâng cao chất lượng ảnh
được phát triển vào khoảng những năm 1955. Điều này có thể giải thích được vì sau thế
chiến thứ hai, máy tính phát triển nhanh tạo điều kiện cho quá trình xử lý ảnh số được
thuận lợi hơn. Năm 1964, máy tính đã có khả năng xử lý và nâng cao chất lượng ảnh từ
mặt trăng và vệ tinh Ranger 7 của Mỹ bao gồm: làm nổi đường biên, lưu ảnh. Từ năm
1964 đến nay, các phương tiện xử lý, nâng cao chất lượng, nhận dạng ảnh phát triển
không ngừng. Các phương pháp tri thức nhân tạo như mạng nơ-ron nhân tạo, các thuật
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH
4
CHƢƠNG 2. CƠ SỞ LÝ THUYẾT
toán xử lý hiện đâị và cải tiến, các công cụ nén ảnh ngày càng được áp dụng rộng rãi và
thu được nhiều kết quả khả quan hơn.
Sau đây, ta sẽ xét các bước cần thiết trong quá trình xử lý ảnh. Đầu tiên, ảnh tự
nhiên từ thế giới bên ngoài được thu nhận qua các thiết bị thu (như Camera, máy chụp
ảnh). Trước đây, ảnh thu qua Camera là các ảnh tương tự (loại Camera ống kiểu CCIR).
Gần đây với sự phát triển của công nghệ, ảnh màu hoặc đen trắng được lấy ra từ Camera,
sau đó nó được chuyển trực tiếp thành ảnh số tạo thuận lợi cho xử lý tiếp theo. Mặt khác,
ảnh cũng có thể tiếp theo. Mặt khác ảnh có thể được quét từ vệ tinh chụp trực tiếp bằng
máy quét ảnh.
Hình 2.1 dưới đây mô tả các bước cơ bản trong xử lý ảnh.
Hình 2.1 Các bước cơ bản trong xử lý ảnh
Sơ đồ này bao gồm các thành phần sau:
2.1.1
Phần thu nhận ảnh (Image Acquisition)
Ảnh có thể nhận qua camera mà hoặc trắng đen. Thường ảnh nhận qua camera là
ảnh tương tự (loại camera ống chuẩn CCIR với tần số 1/25, mỗi ảnh 25 dòng), cũng có
loại camera đã số hóa (như loại CCD – Change Coupled Device) là loại photodiot tạo
cường độ sáng tại mỗi điểm ảnh.
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH
5
- Xem thêm -