LỜI NÓI ĐẦU
Trong những phương pháp tính toán kết cấu hiện nay, các phương pháp số,
đặc biệt là phương pháp phần tử hữu hạn ngày càng được ứng dụng rộng rãi. Ở
các trường đại học kỹ thuật, môn học Phương pháp phần tử hữu hạn đã được đưa
vào chương trình giảng dạy.
Để đáp ứng yêu cầu học tập và nghiên cứu của sinh viên, chúng tôi biên soạn
cuốn sách này nhằm cung cấp cho người đọc những kiến thức cơ bản nhất của
môn học, biết sử dụng phương pháp này để giải những dạng bài toán điển hình
đơn giản, từ đó có cơ sở để vận dụng vào công tác tính toán, thiết kế công trình
trong thực tế. Sách cũng có thể làm tài liệu tham khảo cho các học viên cao học,
các kỹ sư thiết kế cơ khí và công trình.
Để nắm vững môn học này người đọc cần ôn lại hoặc bổ túc thêm các kiến
thức về Cơ học vật rắn, Lý thuyết đàn hồi, Lý thuyết ma trận, Phương trình đạo
hàm riêng. Vì vậy ở cuối cuốn sách chúng tôi giới thiệu thêm về Đại cương Lý
thuyết đàn hồi như là Phần phụ lục của cuốn sách.
Trong quá trình biên soạn cuốn sách, tác giả đã nhận được nhiều ý kién đóng
góp quí báu của các bạn đồng nghiệp, nhân đây chúng tôi xin tỏ lòng cám ơn chân
thành.
Tác giả
PPPTHH �3
Chương 1
KHÁI NIỆM CHUNG
VỀ PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN
1.1. Mô hình rời rạc hóa kết cấu
Trong mấy chục năm gần đây, kỹ thuật tính toán kết cấu đã có những bước phát
triển mới do việc ứng dụng rộng rãi máy tính điện tử. Một trong những phương pháp
tính toán đang được sử dụng ngày càng nhiều và có hiệu quả là phương pháp phần tử
hữu hạn (sau đây viết tắt là PTHH).
Phương pháp PTHH trong tính toán kết cấu là tổng hợp của nhiều bộ môn, vì nó
liên quan đến kiến thức trong ba lĩnh vực sau đây:
- Cơ học kết cấu: sức bền vật liệu, lý thuyết đàn hồi, lý thuyết dẻo, động
lực học�
- Giải tích số: các phương pháp gần đúng, giải hệ phương trình tuyến tính, bài
toán trị riêng�
- Tin học ứng dụng.
Ý tưởng cơ bản của phương pháp PTHH trong tính toán kết cấu là coi vật thể liên
tục như là tổ hợp của nhiều phần nhỏ liên kết với nhau bởi một số hữu hạn các điểm, gọi
là nút. Các phần nhỏ được hình thành gọi là các phần tử hữu hạn (gọi tắt là phần tử).
Hình dạng và kích thước các phần tử có thể khác nhau, tạo thành các mạng lưới khác
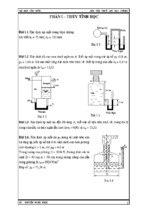
nhau. Trên hình 1.1 giới thiệu một số sơ đồ rời rạc hóa kết cấu liên tục thành mạng lưới
PTHH.
Dĩ nhiên, quan niệm rời rạc hóa như vậy chỉ là gần đúng. Khi thay thế kết cấu
thực (hệ liên tục) bằng tổ hợp các phần tử như trên, người ta thừa nhận rằng, năng lượng
bên trong mô hình thay thế phải bằng năng lượng trong kết cấu thực. Trong mỗi phần
tử, các đại lượng cần tìm (thí dụ chuyển vị, ứng suất) được lấy xấp xỉ theo một dạng
hàm đơn giản gọi là hàm xấp xỉ. Các hàm xấp xỉ, thí dụ hàm xấp xỉ chuyển vị, phải thỏa
mãn điều kiện liên tục trên biên các phần tử tiếp xúc với nhau. Trong một số trường
hợp, các điều kiện tương thích này chỉ thỏa mãn một cách gần đúng.
Người ta căn cứ vào hình dạng và tình hình chịu lực của kết cấu để chọn loại phần
tử thích hợp. Đối với hệ thanh, lấy đoạn dầm và thanh làm PTHH. Với kết cấu tấm
phẳng thường sử dụng các phần tử hình tam giác, phần tử hình chữ nhật, phần tử hình tứ
giác có cạnh thẳng hoặc cong. Đối với kết cấu vỏ, ngoài các loại phần tử tấm phẳng còn
sử dụng phần tử vỏ. Đối với vật thể khối, thường dùng các loại phần tử hình tứ diện,
hình lập phương, hình lục diện. Còn đối với vật thể đối xứng trục, thường dùng phần tử
hình vành khăn. Hình 1.2a giới thiệu một số loại phần tử thường dùng.
Hình 1.1
Tùy theo số lượng nút và cách bố trí nút trong mỗi PTHH, người ta phân biệt các
loại phần tử tuyến tính và phần tử bậc cao, tương ứng với các dạng hàm chuyển vị tuyến
tính và dạng hàm chuyển vị bậc cao. Hình 1.2b giới thiệu 3 loại phần tử bậc cao.
a)
b)
Hình 1.2
Khi phân tích các kết cấu có thể sử dụng các mô hình tính như sau:
1. Mô hình chuyển vị chọn chuyển vị ở các nút làm Nn. Các Nn này được xác định
từ hệ phương trình cân bằng thành lập trên cơ sở nguyên lý thế năng toàn phần dừng.
N guyên lý này phát biểu như sau:
PPPTHH �5
Trong tất cả các trường chuyển vị thỏa mãn các điều kiện tương thích và điều kiện
biên động học, thì trường chuyển vị tương ứng với sự cân bằng của vật thể sẽ làm cho
thế năng toàn phần π đạt giá trị dừng (đạt giá trị cực tiểu).
δπ = δ U + δ V = 0
trong đó:
(1.1)
π = U + V là hàm của các chuyển vị.
U – thế năng biến dạng đàn hồi của vật thể, biểu diễn bằng phần diện
tích vẽ trên hình 1.3.
V – công của ngoại lực sinh ra trên dịch chuyển của ngoại lực do vật
thể bị biến dạng.
N ếu hệ ở trạng thái ổn định, thế năng toàn phần có giá trị cực tiểu.
N hư vậy sau khi giả thiết một dạng hàm chuyển vị trong phần tử, từ điều kiện
dừng của phiếm hàm π ta sẽ nhận được một hệ phương trình cân bằng trong khi các
điều kiện liên tục đã được thỏa mãn.
Hình 1.3
2. Mô hình cân bằng chọn các ứng suất hay nội lực ở các nút làm Nn. Các Nn này
được xác định từ hệ phương trình tương thích thành lập trên cơ sở nguyên lý cực tiểu
của thế năng bù toàn phần. N guyên lý này phát biểu như sau:
Trong tất cả các trường ứng suất thỏa mãn điều kiện cân bằng và điều kiện biên
tĩnh học, thì trường ứng suất thỏa mãn điều kiện tương thích sẽ làm cho thế năng bù
toàn phần π ∗ đạt giá trị dừng.
δπ ∗ = δ U ∗ + δ V ∗ = 0
trong đó:
(1.2)
π ∗ = U ∗ + V ∗ là hàm của các ứng suất.
U ∗ - thế năng bù của biến dạng, biểu diễn bằng phần diện tích phía trên
vẽ trên hình 1.3.
V ∗ - công bù của ngoại lực.
Thông thường người ta hay sử dụng mô hình chuyển vị vì nó thuận lợi hơn cho
việc tự động hóa tính toán trên máy tính. Do đó trong tài liệu này chỉ đề cập đến mô
hình chuyển vị của phương pháp PTHH.
1.2. Hàm chuyển vị. Hàm dạng
1.2.1. Đa thức xấp xỉ. Hàm chuyển vị
N ếu sử dụng mô hình chuyển vị trong phương pháp PTHH thì hàm xấp xỉ của đại
lượng cần tìm là hàm chuyển vị. Hàm này mô tả gần đúng chuyển vị của các điểm trong
phần tử. Thông thường người ta chọn hàm chuyển vị dưới dạng đa thức, bởi vì ở dạng
đa thức dễ đạo hàm, tích phân, dễ thiết lập công thức khi xây dựng các phương trình cơ
bản của phương pháp PTHH. Bậc của đa thức và số lượng số hạng trong đa thức phụ
thuộc vào bậc tự do của phần tử, tức là số chuyển vị ở tất cả các nút của phần tử. Điều
này sẽ nói kỹ hơn khi phân tích những kết cấu cụ thể trong những phần sau.
Các đa thức xấp xỉ phải thỏa mãn điều kiện hội tụ, tức là khi kích thước phần tử
nhỏ dần thì kết quả sẽ hội tụ đến lời giải chính xác. Muốn vậy trong đa thức được chọn
phải tồn tại số hạng tự do (hằng số) và tồn tại đạo hàm riêng đến bậc cao nhất trong
phiếm hàm năng lượng.
Thí dụ, đối với bài toán một chiều có thể chọn:
f ( x ) = α1 + α 2 x
(xấp xỉ tuyến tính)
f ( x ) = α1 + α 2 x + α 3 x 2
(xấp xỉ bậc hai)
n +1
f ( x) = ∑ α i xi −1
(xấp xỉ bậc n)
1
Đối với bài toán hai chiều có thể chọn:
f ( x , y ) = α1 + α 2 x + α 3 y
(xấp xỉ tuyến tính)
f ( x, y ) = α1 + α 2 x + α 3 y + α 4 x 2 + α 5 xy + α 6 y 2 (xấp xỉ bậc hai)
1.2.2. Biểu diễn hàm chuyển vị qua chuyển vị nút. Hàm dạng
Hình 1.4
PPPTHH �7
Ta xem xét một PTHH hình tam giác trong bài toán phẳng của Lý thuyết đàn hồi.
Phần tử có 3 nút là 3 đỉnh của tam giác, nối khớp với các phần tử khác (hình 1.4). Mỗi
nút có 2 bậc tự do, tức là có thể chuyển dịch theo 2 phương x và y. N hư vậy phần tử có
6 bậc tự do, chúng được biểu diễn bằng 6 chuyển vị ở các nút là ui , vi , u j , v j , um , vm . Ta
gọi đó là các chuyển vị nút. Chúng hợp thành vectơ chuyển vị nút của phần tử:
ui
v
i
u
{δ } = j
vj
um
vm
(1.3)
Các chuyển vị nút này là Nn của bài toán tính kết cấu theo mô hình chuyển vị của
phương pháp PTHH. Trong nhiều trường hợp, các thành phần trong vectơ chuyển vị nút
không chỉ bao gồm các giá trị hàm chuyển vị tại các nút, mà còn có cả giá trị đạo hàm
của hàm chuyển vị nữa (thí dụ trong bài toán uốn thanh, bài toán tấm�).
N hư đã thấy, hàm chuyển vị (đa thức xấp xỉ) là hàm của các tọa độ, cho phép xác
định chuyển vị tại một điểm bất kỳ trong phần tử. Bây giờ ta tìm cách biểu diễn hàm
chuyển vị theo các chuyển vị nút.
Thí dụ hàm chuyển vị của phần tử tam giác có dạng:
u ( x , y ) = α1 + α 2 x + α 3 y
(1.4)
v ( x, y ) = α 4 + α 5 x + α 6 y
u ( x, y ) 1 x y 0 0 0
=
v ( x, y ) 0 0 0 1 x y
{ f } =
hay
hoặc
trong đó:
α1
α
2
α 3
α 4
α 5
α 6
{ f } = [Q]{α }
{ f } là vectơ chuyển vị
[Q ] là ma trận các đơn thức
{α } là vectơ các tham số
(1.5)
(1.6)
Chuyển vị tại các nút, theo (1.6) ta có
trong đó:
{δ } = [C ]{α }
[C ] là giá trị [Q ] tại các nút, tức là ma trận tọa độ nút.
(1.7)
Có thể xác định {α } theo [C ] , ta có từ (1.7)
{α } = [C ] {δ }
−1
(1.8)
Do đó theo (1.6): { f } = [Q ][C ]
−1
{δ }
(1.9)
{ f } = [ � ]{δ }
hay
(1.10)
(1.11)
[ � ] = [Q ][C ]
Ma trận [ � ] gọi là ma trận các hàm dạng, còn gọi là ma trận các hàm nội suy, vì
−1
trong đó:
có thể từ chuyển vị các nút nội suy ra chuyển vị của điểm bất kỳ. Các hàm dạng có một
ý nghĩa rất quan trọng khi phân tích kết cấu theo phương pháp PTHH.
1.2.3. Lực nút
Khi vật thể chịu lực, trong các phần tử sinh ra các nội lực. Phương pháp PTHH
giả thiết rằng các nội lực này đều truyền qua nút. Các lực tác dụng lên nút gọi là lực nút,
đó là lực tương tác giữa các phần tử liên kết với nhau tại nút do các chuyển vị nút sinh
ra. Đương nhiên tại các nút còn có thể có các ngoại lực (tải trọng). N ếu tải trọng không
đặt tại nút thì phải dời về nút theo phép biến đổi tương đương.
Trong mỗi phần tử các lực nút hợp thành vectơ lực nút { F } . Vectơ này có số
thành phần bằng số thành phần của vectơ chuyển vị nút, được sắp xếp tương ứng với
vectơ chuyển vị nút. Thí dụ đối với phần tử tam giác phẳng ở hình 1.4, ta có vectơ lực
nút (hình 1.5a) là:
e
{F }
e
= U i Vi U j V j U m Vm
T
Hay thí dụ đối với phần tử thanh chịu uốn (hình 1.5b), tương ứng với vectơ
chuyển vị nút (gồm chuyển vị thẳng và góc quay)
{δ } = vi θi
v j θ j
T
là vectơ lực nút
{F }
e
= Vi
Mi Vj
M j
T
a)
b)
Hình 1.5
PPPTHH �9
1.3. Phương trình cơ bản của phương pháp PTHH
1.3.1. Các quan hệ chuyển vị, biến dạng, ứng suất trong phần tử
Theo mô hình chuyển vị của phương pháp PTHH, đại lượng cần tìm đầu tiên là
chuyển vị ở các nút. Sau khi chọn hàm xấp xỉ của chuyển vị, ta xác định được trường
chuyển vị theo chuyển vị nút:
{ f } = [ � ]{δ }
(1.12)
Sử dụng phương trình biến dạng Cauchy trong Lý thuyết đàn hồi
{ε } = [∂ ]{ f }
trong đó:
(1.13)
[∂ ] là toán tử vi phân
∂
∂x
0
0
[∂ ] = ∂
∂x
0
∂
∂z
0
∂
∂y
0
∂
∂x
∂
∂y
0
0
0
∂
∂z
0
∂
∂y
∂
∂z
(1.14)
ta có vectơ biến dạng:
{ε } = [∂ ][ � ]{δ }
hay
{ε } = [B ]{δ }
(1.15)
trong đó:
[ B ] = [ ∂ ][ � ]
(1.16)
gọi là ma trận tính biến dạng.
Ứng suất tại một điểm trong phần tử xác định theo định luật Hooke:
{σ } = [ D ]{ε }
trong đó:
(1.17)
[ D ] gọi là ma trận đàn hồi.
Từ đó theo (1.15) ta có vectơ ứng suất:
{σ } = [ D ][ B ]{δ }
(1.18)
hay
{σ } = [ S ]{δ }
(1.19)
trong đó:
[ S ] = [ D ][ B ]
(1.20)
gọi là ma trận tính ứng suất.
1.3.2. Phương trình cơ bản của phương pháp phần tử hữu hạn. Ma trận độ cứng
phần tử. Vectơ tải phần tử
Sau đây ta sử dụng nguyên lý cực tiểu thế năng toàn phần để thiết lập phương
trình cơ bản của phương pháp PTHH.
Giả sử một PTHH có thể tích Ve chịu tác dụng của lực thể tích p và lực bề mặt q
trên diện tích Se . Thế năng toàn phần của phần tử là Ue có thể viết dưới dạng:
U e = ∫∫∫
Ve
1 T
T
T
[ε ] {σ } dV − ∫∫∫ [ f ] { p} dV − ∫∫ [ f ] {q} dS
2
Ve
Se
(1.21)
Để ý tới (1.12), (1.15), (1.19) ta có
1
∫∫∫ 2 [δ ] [ B ] [ D ][ B ]{δ } dV − ∫∫∫ {δ }[ � ] { p} dV − ∫∫ [δ ] [ � ] {q} dS
T
T
T
Ve
hay U e =
Đặt
T
Ve
1 T
[δ ]
2
T
(1.22)
Se
T
T
T
T
∫∫∫ [ B ] [ D ][ B ] dV {δ } − {δ } ∫∫∫ [ � ] { p} dV + ∫∫ [ � ] {q} dS
Ve
Ve
Se
[ k ] = ∫∫∫ [ B ] [ D ][ B ] dV
T
(1.23)
(1.24)
Ve
và
{P}
e
= ∫∫∫ [ � ]
T
Ve
ta có
Ue =
{ p} dV + ∫∫ [ � ] {q} dS
T
(1.25)
Se
1 T
T
e
[δ ] [ k ]{δ } − [δ ] {P}
2
(1.26)
Ma trận [ k ] gọi là ma trận độ cứng phần tử, còn vectơ { P} là vectơ tải phần tử
bao gồm các thành phần lực đặt tại nút, các lực này được quy đổi sau khi dời các tải
e
trọng P và q về nút, do đó { P} còn gọi là lực nút tương đương.
e
Trong trường hợp ở nút có tồn tại lực tập trung
{R}
e
R1
R
= 2
M
Rn
thì phải cộng thêm các lực tập trung này vào vectơ tải { P} .
e
PPPTHH �11
Theo nguyên lý cực tiểu thế năng toàn phần, điều kiện cân bằng tại các nút của
phần tử là:
∂U e
=0
(1.27)
∂ {δ }
∂U e
∂U e
∂U e
=0 ,
= 0 , ... ,
=0
∂ {δ1}
∂ {δ 2 }
∂ {δ n }
tức là
(1.28)
Sau khi lấy cực tiểu từ (1.26) ta được
[ k ]{δ } = {P}
e
(1.29)
Đây là phương trình cơ bản của phương pháp phần tử hữu hạn tính theo mô hình
chuyển vị. Điều đó có nghĩa là tại từng nút, lực nút do chuyển vị nút gây ra
{F }δ = [ k ]{δ } phải cân bằng với tải trọng đặt ở nút.
e
{F }δ = {P}
e
e
Trong trường hợp PTHH có biến dạng ban đầu ε 0 và ứng suất ban đầu σ 0 thì
quan hệ (1.18) đổi thành:
{σ } = [ D ][ B ]{δ } − [ D ]{ε 0 } + {σ 0 }
(1.30)
Do đó vectơ tải phần tử (1.25) có thêm thành phần do ε 0 và σ 0 gây ra:
{P}
e
= ∫∫∫ [ � ]
T
Ve
{ p} dV + ∫∫ [ � ] {q} dS − ∫∫∫ [ B ] [ D ]{ε 0 } dV + ∫∫∫ [ B ] {σ 0 } dV
T
Se
T
Ve
T
Ve
(1.31)
1.3.3. Ma trận độ cứng tổng thể. Vectơ tải tổng thể. Phương trình cơ bản của hệ
Sau khi thiết lập được các ma trận độ cứng phần tử và vectơ tải phần tử của tất cả
các phần tử trong mạng lưới kết cấu, ta cần phải tổ hợp tất cả chúng lại thành ma trận độ
cứng tổng thể [ K ] và vectơ tải tổng thể [ P ] của kết cấu, từ đó xây dựng phương trình
cơ bản đối với toàn bộ kết cấu.
Việc tổ hợp này có nghĩa là phải sắp xếp các thành phần trong các ma trận [ k ] của
các phần tử vào các vị trí thích hợp trong ma trận [ K ] , và các thành phần trong các ma
trận { P} của các phần tử vào các vị trí thích hợp trong { P} . Sự sắp xếp này được mô tả
bằng ma trận định vị của các phần tử.
e
Gọi vectơ chuyển vị nút của phần tử là {δ } và vectơ chuyển vị nút tổng thể của
toàn bộ kết cấu là {∆} , thì quan hệ giữa chúng có thể biểu diễn dưới dạng:
{δ } = [ L ]e {∆}
nd ×1
nd × n
(1.32)
trong đó:
[ L ]e
là ma trận định vị của phần tử, nd là số chuyển vị nút trong mỗi
phần tử, n là số chuyển vị nút trong toàn bộ kết cấu. Thí dụ có thanh
chịu kéo như hình 1.6.
Hình 1.6
Chia thanh thành 4 phần tử, 5 nút đánh số như hình vẽ. Vectơ chuyển vị nút
tổng thể:
{∆} = [∆1
∆2
∆3
∆4
∆5 ]
T
(1.33)
Vectơ chuyển vị nút của các phần tử:
{δ }
∆ 1
= 1 =
∆ 2 0
∆ 0
2
{δ } = 2 =
∆ 3 0
0 0 0 0
{∆} = [ L ]1 {∆}
1 0 0 0
1 0 0 0
{∆} = [ L ]2 {∆}
0 1 0 0
∆ 0
= 3 =
∆ 4 0
∆ 0
4
{δ } = 4 =
∆5 0
0 1 0 0
{∆} = [ L ]3 {∆}
0 0 1 0
0 0 1 0
{∆} = [ L ]4 {∆}
0 0 0 1
1
{δ }
3
(1.34)
Căn cứ vào (1.26) ta có thể viết được biểu thức thế năng toàn phần của toàn bộ
kết cấu:
ne
ne
ne
1 T
T
e
[δ ] [ k ]{δ } − ∑ [δ ] {P}
e =1 2
e =1
U = ∑U e = ∑
e =1
(1.35)
Để ý đến (1.32) ta có
ne
ne
1 T
T
T
T
e
∆
L
k
L
∆
−
{
}
[ ] [ ]e [ ][ ]e
[ ∆ ] [ L ]e {P}
∑
e =1 2
e =1
U =∑
ne
1 T ne
T
T
T
e
= [ ∆ ] ∑ [ L ]e [ k ][ L ]e {∆} − [ ∆ ] ∑ [ L ]e {P}
2
e =1
e =1
hay
U=
1 T
T
[ ∆ ] [ K ]{∆} − [ ∆ ] {P}
2
(1.36)
PPPTHH �13
ne
với
[ K ] = ∑ [ L ]e [ k ][ L ]e
T
(1.37)
e =1
là ma trận độ cứng tổng thể của toàn bộ kết cấu,
ne
và
{P} = ∑ [ L ]e {P}
T
e
(1.38)
e =1
là vectơ tải tổng thể.
Sử dụng nguyên lý cực tiểu thế năng đối với toàn bộ kết cấu, ta có điều kiện cân
bằng của toàn hệ là
∂U
=0
(1.39)
∂∆
Từ đó được hệ phương trình cơ bản của toàn bộ kết cấu:
[ K ]{∆} = {P}
(1.40)
Trong thực tế tính toán người ta không sử dụng các công thức (1.37) và (1.38) để
thiết lập [ K ] và { P} , mà sử dụng phương pháp đơn giản và nhanh chóng hơn, đó là
phương pháp chỉ số. Điều này sẽ trình bày ở những phần sau.
1.4. Trình tự tính kết cấu theo phương pháp phần tử hữu hạn
Quá trình giải bài toán tính kết cấu theo phương pháp PTHH bao gồm các bước
sau đây:
(1) Rời rạc hóa kết cấu, tức là chia kết cấu thành mạng lưới các PTHH. Việc chọn
loại phần tử và số lượng phần tử tùy thuộc vào tính chất và độ chính xác yêu cầu của
bài toán.
(2) Chọn hàm xấp xỉ chuyển vị mô tả chuyển vị của các điểm trong PTHH.
(3) Thiết lập ma trận độ cứng của từng PTHH. N ếu hệ tọa độ phần tử và hệ tọa độ
kết cấu không trùng nhau thì phải thực hiện phép biến đổi tọa độ.
(4) Thiết lập ma trận độ cứng tổng thể và vectơ tải tổng thể của toàn bộ kết cấu.
(5) Thành lập hệ phương trình cơ bản của kết cấu có dạng:
[ K ]{∆} = {P}
Cần chú ý là ma trận độ cứng [ K ] là ma trận suy biến vì ta đã coi phần tử có
chuyển động tự do (chuyển động cố thể). Do đó cần sử dụng các điều kiện biên động
học để thành lập vectơ chuyển vị nút {∆∗ } chỉ chứa các chuyển vị nút là Nn, và tương
{ }
ứng có các ma trận độ cứng K ∗ và vectơ tải tổng thể P * . Từ đó có phương trình:
K ∗ {∆∗ } = {P ∗ }
(1.41)
Giải hệ phương trình này tìm được vectơ chuyển vị nút tổng thể trong hệ tọa độ
tổng quát.
(6) Xác định vectơ chuyển vị nút của từng PTHH trong hệ tọa độ địa phương của
từng phần tử. Từ đó xác định biến dạng, ứng suất trong từng phần tử.
Chương 2
TÍNH HỆ THANH
2.1. Phần tử hữu hạn trong hệ thanh
Trong các hệ thanh như kết cấu giàn, kết cấu khung, các đoạn thanh hình lăng trụ
được coi là các PTHH.
Trong kết cấu thanh, các thành phần chuyển vị của phần tử là hàm của một biến,
tức là chỉ thay đổi dọc theo trục thanh, do đó bài toán hệ thanh là bài toán một chiều. Ở
kết cấu giàn, các phần tử chịu biến dạng kéo hoặc nén, còn ở kết cấu khung phẳng các
phần tử còn chịu thêm biến dạng uốn. N ếu là khung không gian còn có thể có thêm biến
dạng xoắn. Vì vậy để dễ dàng nghiên cứu và tổng hợp, ta lần lượt phân tích ba loại phần
tử nói trên.
2.1.1. Phần tử thanh chịu kéo (nén) dọc trục
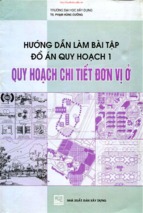
Có một phần tử thanh hình lăng trụ có tiết diện không đổi A, chiều dài a, chịu kéo
hoặc nén dọc trục dưới tác dụng của tải trọng phân bố dọc trục q(x) (hình 2.1).
Hình 2.1
Chọn hệ tọa độ như hình vẽ. Phần tử thanh có 2 nút là hai đầu thanh, nút đầu là i,
nút cuối là j, với các chuyển vị nút là δ i và δ j . Vì các chuyển vị nút đều có phương
trùng với trục x nên ta có thể viết vectơ chuyển vị nút:
δ
u
j
j
{δ } = δ i = u i
(2.1)
Tương ứng với vectơ chuyển vị nút ta có vectơ lực nút của phần tử:
{F}
e
U i
=
U j
Chọn hàm chuyển vị có dạng:
u ( x ) = α1 + α 2 x
(2.2)
Đây là hàm bậc nhất chứa 2 hệ số, đúng bằng số bậc tự do (số chuyển vị nút) của
phần tử. Điều này đảm bảo điều kiện tương thích của hàm chuyển vị trên các biên
chung giữa các phần tử lân cận.
Chuyển vị tại nút i (x = 0) là ui , tại nút j (x = a) là u j , thay vào (2.2) được
PPPTHH �15
ui = α1
(2.3)
u j = α1 + α 2 a
Viết dưới dạng ma trận:
hay
Từ đó có
trong đó:
ui 1 0 α1
=
u j 1 a α 2
(2.4)
{δ } = [C ]{α }
(2.5)
{α } = [C ] {δ }
(2.6)
−1
[C ]
là ma trận nghịch đảo của [C ]
[C ]
1
= 1
−
a
−1
−1
0
1
a
(2.7)
Biểu diễn (2.2) dưới dạng ma trận và để ý tới (2.6) ta có
α
u = [1 x ] 1
α 2
= [Q ]{α } = [Q ][C ]
−1
hay
u = [ � ]{δ }
trong đó
[ � ] = [Q ][C ]
{δ }
(2.8)
−1
(2.9)
Từ đó ta có
[ � ] = 1 −
x
a
x
a
(2.10)
[� ]
gọi là ma trận các hàm dạng (còn gọi là hàm nội suy Lagrange
bậc 1)
[ � ] = [ �1
�2 ]
(2.11)
với các hàm dạng:
�1 = 1 −
x
,
a
�2 =
x
a
(2.12)
Biểu thức (2.8) biểu diễn quan hệ giữa hàm chuyển vị với các chuyển vị nút. Hàm
dạng là hàm của tọa độ, biểu diễn sự phân bố của chuyển vị trong phần tử khi chuyển vị
nút bằng đơn vị.
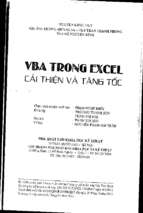
Trên hình 2.2 là biểu đồ của các hàm dạng �1 ( x) , � 2 ( x) và biểu đồ của chuyển
vị u ( x) .
i
j
Hình 2.2
Bây giờ ta xét biến dạng và ứng suất trong phần tử.
Phương trình biến dạng Cauchy biểu diễn quan hệ giữa biến dạng và chuyển vị
trong bài toán một chiều có dạng
εx =
∂u
∂x
(2.13)
Theo (2.2) ta có
ε x = α2
hay viết dưới ma trận
α1
α 2
{ε } = [0 1]
Để ý tới (2.6) ta có
{ε } = [ 0 1][C ] {δ }
−1
1 0
= [ 0 1] 1 1 {δ }
−
a a
1 1
= −
{δ }
a a
{ε } = [ B ]{δ }
hay
trong đó
[ B ] = −
1
a
1
a
(2.14)
(2.15)
Ma trận [ B ] gọi là ma trận tính biến dạng.
N hư vậy biến dạng phần tử có thể biểu diễn qua chuyển vị nút. Trong trường hợp
này [ B ] là hằng số, chứng tỏ biến dạng trong phần tử chịu kéo (nén) là hằng số.
PPPTHH �17
Ứng suất pháp tại một điểm trong phần tử theo phương dọc trục đối với vật liệu
đàn hồi tuyến tính được xác định dựa vào định luật Hooke:
σ = Eε
trong đó:
(2.16)
E là mô đun đàn hồi Young của vật liệu. Viết (2.16) một cách tổng
quát dưới dạng ma trận:
{σ } = [ D ]{ε }
trong đó:
(2.17)
[ D]
là ma trận đàn hồi. Trong trường hợp bài toán một chiều có biến
dạng dọc trục thì
[ D] = E
Ta có thể biểu diễn ứng suất qua chuyển vị nút
{σ } = [ D ][ B ]{δ }
(2.18)
hay
{σ } = [ S ]{δ }
(2.19)
trong đó
[ S ] = [ D ][ B ]
(2.20)
gọi là ma trận tính ứng suất.
Ta nhận thấy, do biến dạng là hằng số nên ứng suất trong phần tử cũng là hằng số.
Ma trận độ cứng phần tử được thiết lập dựa vào công thức (1.24):
[ k ] = ∫∫∫ [ B ] [ D ][ B ] dV
T
Ve
1
−
a a
1
= ∫ E −
0
1 a
a
1
Adx
a
(2.21)
Sau khi tích phân được
EA
[ k ] = aEA
−
a
EA
a
EA
a
−
Đó là một ma trận vuông đối xứng.
Vectơ tải phần tử, ở đây là vectơ lực nút tương đương, theo (1.25) ta có
(2.22)
{P}
e
T
= ∫ [ � ] {q} dx
a
0
x
1−
a
a
=∫
q ( x)dx
0
x
a
Trong trường hợp tải trọng phân bố đều q ( x) = q0 = const thì
{P}
e
q0 a
2
=
q0 a
2
(2.23)
tức là phân bố theo sơ đồ sau:
Hình 2.3
Trường hợp có tải trọng tập trung P đặt tại điểm có tọa độ x thì
{P} = [ � ]
e
T
.P
Trường hợp phần tử có biến thiên nhiệt độ ∆T với hệ số dãn nhiệt α thì
{P}
e
= ∫∫∫ [ B ] [ D ]{ε 0 } dV
T
Ve
1
−
a
a
= ∫ E {α ∆T } Adx
0
1
a
(2.24)
−1
= EA α ∆T
1
2.1.2. Phần tử thanh chịu uốn
Phần tử thanh có tiết diện không đổi A , chiều dài a. Chọn trục x là trục thanh,
trục y là một trục quán tính chính trung tâm của tiết diện thanh (hình 2.4).
Tại 2 nút i và j có các thành phần chuyển vị thẳng theo phương y là vi , v j và các
thành phần chuyển vị góc (góc quay quanh trục z) là θ zi , θ zj . Trên hình vẽ các chuyển vị
có dấu dương. Ta có vectơ chuyển vị nút
PPPTHH �19
vi
θ
δ
=
{ } vzi
j
θ zj
(2.25)
Hình 2.4
Tương ứng với các thành phần chuyển vị nút là các lực nút. Ta có vectơ lực nút
của phần tử
{F }
e
Vi
M
zi
=
Vj
M zj
(2.26)
Vectơ chuyển vị nút gồm 4 thành phần, do đó ta chọn hàm chuyển vị là một đa
thức bậc ba chứa 4 thông số độc lập:
v ( x ) = α1 + α 2 x + α 3 x 2 + α 4 x 3
(2.27)
Vì giữa chuyển vị thẳng v( x) và chuyển vị góc θ z ( x) có quan hệ đạo hàm
∂v
= θz
∂x
do đó chỉ cần chọn hàm xấp xỉ đối với v( x) là đủ.
Viết (2.27) dưới dạng ma trận:
v = 1 x
hay
v = [Q ]{α }
x2
α1
α
3 2
x
α 3
α 4
(2.28)
(2.29)
trong đó:
[Q ] = 1
x3
x2
x
(2.30)
Các thành phần chuyển vị tại nút i ( x = 0) và nút j ( x = a ) tính được
vi = α1
∂v
= α2
∂x x =0
θ zi =
v j = α1 + α 2 a + α 3 a 2 + α 4 a 3
∂v
θ zj = = α 2 + 2α 3a + 3α 4 a 2
∂x x = a
Viết dưới dạng ma trận:
vi 1
θ zi 0
=
v j 1
θ zj 0
hay
0 0
0 α1
1 0
0 α 2
a a 2 a 3 α 3
1 2a 3a 2 α 4
(2.31)
{δ } = [C ]{α }
(2.32)
−1
{α } = [C ] {δ }
(2.33)
Từ đó ta có
trong đó:
1
0
−1
C
=
[ ] −3 / a 2
3
2/a
0
0
1
0
−2 / a
3 / a2
1/ a 2
−2 / a 3
0
0
−1/ a
1/ a 2
(2.34)
Kết hợp (2.29) và (2.33) ta được
v( x) = [Q ][C ]
−1
hay
{δ }
(2.35)
v( x) = [ � ]{δ }
(2.36)
trong đó ma trận các hàm dạng
[ � ] = [Q ][C ]
−1
[ � ] = 1 −
(2.37)
3x 2 2 x3
+ 3
a2
a
x−
2 x2 x3
+ 2
a
a
3x 2 2 x3
− 3
a2
a
−
x 2 x3
+ (2.38)
a a2
Ta cũng có thể viết
[ � ] = [ �1
�2
�3
�4 ]
(2.39)
PPPTHH �21
trong đó các hàm dạng là
3x 2 2 x3
+ 3
a2
a
2
x3
2x
�2 = x −
+ 2
a
a
(2.40)
2
3
3x 2 x
�3 = 2 − 3
a
a
2
x
x3
�4 = − + 2
a a
Các hàm dạng này còn gọi là hàm nội suy Hermite.
Theo lý thuyết uốn của dầm, nếu trên phần tử thanh không có lực phân bố tác
dụng (điều này phù hợp với giả thiết của phương pháp PTHH là đưa tải trong trên phần
tử về các nút) thì độ võng của thanh phải thỏa mãn phương trình vi phân
�1 = 1 −
d 4v
=0
(2.41)
dx 4
Chuyển vị tính theo (2.27) rõ ràng có thể thỏa mãn phương trình (2.41). Đồ thị các
hàm dạng và đồ thị của chuyển vị (xấp xỉ) được biểu diễn trên hình 2.5.
EJ
v( x ) = N 1 u i + N 2 θ zi + N 3 u j + N 4 θ zj
Hình 2.5
Bây giờ ta xét biến dạng và ứng suất trong từng phần tử.
Theo lý thuyết dầm ta có công thức tính biến dạng (ở đây là độ cong):
∂ 2v
∂x 2
Để ý tới (2.27) và (2.42) được
{ε x } = −
(2.42)
- Xem thêm -