TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
VIỆN CÔNG NGHỆ THÔNG TIN VÀ TRUYỀN THÔNG
----------
BÀI TẬP LỚN
XỬ LÝ TÍN HIỆU NGẪU NHIÊN
ĐỀ TÀI:
TÌM HIỂU LÝ THUYẾT VÀ CÁC ỨNG DỤNG CỦA BỘ LỌC
KALMAN
Nhóm sinh viên thực hiện:
Bùi Đình Cường
Nguyễn Khánh Hưng
20080355
20081279
Giáo viên hướng dẫn: PGS.TS Nguyễn Linh Giang
HÀ NỘI 8-2012
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 1
LỜI GIỚI THIỆU ......................................................................................................................... 3
I.
LÝ THUYẾT BỘ LỌC KALMAN ...................................................................................... 4
1.
Lý thuyết về ước lượng ..................................................................................................................... 4
1.1.
Khái niệm .................................................................................................................................. 4
1.2.
Đánh giá chất lượng .................................................................................................................. 4
1.3.
Kỳ vọng (Expectation) .............................................................................................................. 5
1.4.
Phương sai (Variance)............................................................................................................... 6
1.5.
Độ lệch chuẩn............................................................................................................................ 7
1.6.
Hiệp phương sai (Covariance) .................................................................................................. 7
1.7.
Ma trận hiệp phương sai ........................................................................................................... 8
1.8.
Phân phối chuẩn (phân phối Gaussian) ..................................................................................... 8
1.9.
Ước lượng của trung bình và phương sai ................................................................................ 10
Phương pháp bình phương tối thiểu .................................................................................... 11
1.10.
2.
Bộ lọc Kalman ................................................................................................................................ 12
2.1.
Giới thiệu chung về bộ lọc Kalman ........................................................................................ 12
2.2.
Mô hình toán học .................................................................................................................... 15
2.2.1.
Hệ thống và mô hình quan sát ......................................................................................... 15
2.2.2.
Giả thiết ........................................................................................................................... 15
2.2.3.
Nguồn gốc ....................................................................................................................... 16
2.2.4.
Điều kiện không chệch.................................................................................................... 17
2.2.5.
Hiệp phương sai sai số .................................................................................................... 19
2.2.6.
Độ lời Kalman ................................................................................................................. 20
2.2.7.
Tóm tắt các phương trình của bộ lọc Kalman ................................................................. 21
II.
ỨNG DỤNG CỦA BỘ LỌC KALMAN ........................................................................ 24
III.
CÀI ĐẶT THỬ NGHIỆM ............................................................................................... 26
1.
Tao nhiễu Gaussian ......................................................................................................................... 26
2.
Cài đặt bộ lọc Kalman..................................................................................................................... 27
IV.
2.1.
Mô phỏng hoạt động của bộ lọc Kalman ................................................................................ 27
2.2.
Mô phỏng hoạt động của bộ lọc Kalman mở rộng .................................................................. 31
KẾT LUẬN ....................................................................................................................... 32
TÀI LIỆU THAM KHẢO .......................................................................................................... 33
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 2
LỜI GIỚI THIỆU
Ngày nay, nền công nghệ thế giới đang phát triển nhanh chóng và hàng loạt các
giải pháp công nghệ ra đời mỗi năm. Theo đó, các sinh viên ngành công nghệ ngoài việc
tiếp thu các kiến thức ở giảng đường còn phải tìm hiểu nghiên cứu thêm các công nghệ
tiên tiến trên thế giới để có thể đáp ứng được yêu cầu cao của thị trường lao động. Trong
những năm gần đây các loại cảm biến, thiết bị đo lường được sử dụng rộng rãi trong dân
dụng cũng như trong công nghiệp. Thế nhưng nhiều loại thiết bị lại rất nhạy với nhiễu,
vấn đề làm sao để loại nhiễu ra khỏi tín hiệu là một vấn đề thực sự không đơn giản.
Với những ưu điểm vượt trội, tiềm năng ứng dụng của thuật toán Kalman vào
thực tế trong việc áp dụng để lọc nhiễu trong tín hiệu là rất khả quan, vì vậy việc nghiên
cứu để năm rõ và tiến tới làm chủ phương pháp này là rất cần thiết và bổ ích. Ngoài ra
với mong muốn áp dụng và lập trình thuật toán Kalman vào thực tế nên nhóm chúng em
chọn đề tài: “TÌM HIỂU LÝ THUYẾT VÀ CÁC ỨNG DỤNG CỦA BỘ LỌC
KALMAN”.
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 3
I.
LÝ THUYẾT BỘ LỌC KALMAN
Vào năm 1960, R.E Kalman đã công bố bài báo nổi tiếng về một giải pháp truy
hồi để giải quyết một bài toán lọc thông tin rời rạc truyến tính (discrete data linear
filtering). Tên đầy đủ của bài báo là “A New Approach to Linear Filtering and Prediction
Problems”. Từ đó đến nay cùng với sự phát triển của tính toán kỹ thuật số, bộ lọc Kalman
đã trở thành chủ đề nghiên cứu sôi nổi và được ứng dụng trong nhiều ngành kỹ thuật
công nghệ khác nhau: trong tự động hóa, trong định vị cũng như trong viễn thông và
trong nhiều lĩnh vực khác.
Một cách khái quát, bộ lọc Kalman là một tập hợp các phương trình toán học mô
tả một phương pháp tính toán truy hồi hiệu qủa cho phép ước đoán trạng thái của một quá
trình sao cho trung bình phương sai của độ là nhỏ nhất. Bộ lọc Kalman rất hiệu quả trong
việc ước đoán các trạng thái trong quá khứ, hiện tại và tương lai thậm chí ngay cả khi
tính chính xác của hệ thống mô phỏng không được khẳng định.
1. Lý thuyết về ước lượng
1.1.
Khái niệm
Trong thống kê, một ước lượng là một giá trị được tính toán từ một mẫu thử và
người ta hy vọng đó là giá trị tiêu biểu cho giá trị cần xác định trong tập hợp. Người ta
luôn tìm một ước lượng sao cho đó là ước lượng “không chệch”, hội tụ, hiệu quả và
vững(robust)..
1.2.
Đánh giá chất lượng
Một ước lượng là một giá trị x được tính toán trên một mẫu được lấy một cách
ngẫu nhiên, do đó giá trị của x là một biến ngẫu nhiên với kì vọng E(x) và phương sai
V(x). Nghĩa là giá trị x có thể dao động tùy theo mẫu thử, nó có ít cơ hội để có thể bằng
đúng chính xác giá trị X mà nó đang ước lượng. Mục đích ở đây là ta muốn có thể kiểm
soát sự sai lệch giá trị x và giá trị X.
Một biến ngẫu nhiên luôn dao động xung quanh giá trị kì vọng của nó. Ta muốn là
kì vọng của x phải bằng X. Khi đó ta nói ước lượng là không chệch. Trung bình tích lũy
trong ví dụ về chiều cao trung bình của trẻ 10 tuổi một ước lượng đúng, trong khi ước
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 4
lượng về tổng số cá trong hồ được tính như trong ví dụ là một ước lượng không đúng, đó
là ước lượng thừa: trung bình tổng số cá ước lượng được luôn lớn hơn tổng số cá có thực
trong hồ.
Ta cũng muốn là khi mẫu thử càng rộng, thì sai lệch giữa x và X càng nhỏ. Khi đó
ta nói ước lượng là hội tụ. Định nghĩa theo ngôn ngữ toán học là như sau:
(xn) hội tụ nếu lim 𝑝(|𝑥𝑛 − 𝑋| > 𝜀) = 0 với mọi số thực dương (xác suất để sai lệch với
𝑛→∞
giá trị thực cần ước lượng lớn hơn tiến về 0 khi kích cỡ của mẫu thử càng lớn).
Biến ngẫu nhiên dao động quanh giá trị kì vọng của nó. Nếu phương sai V(x) càng
bé, thì sự dao động càng yếu. Vì vậy ta muốn phương sai của ước lượng là nhỏ nhất có
thể. Khi đó ta nói ước lượng là hiệu quả.
Cuối cùng, trong quá trình điều tra, có thể xuất hiện một giá trị “bất thường” (ví dụ
có trẻ 10 tuổi nhưng cao 1,80 m). Ta muốn giá trị bất thường này không ảnh hưởng quá
nhiều đến giá trị ước lượng. Khi đó ta nói ước lượng là vững. Có thể thấy trung bình tích
lũy trong ví dụ về chiều cao trung bình trẻ 10 tuổi không phải là một ước lượng vững.
1.3.
Kỳ vọng (Expectation)
Định nghĩa: Giả sử 𝑋 là đại lượng ngẫu nhiên rời rạc có thể nhận các giá trị
𝑥1 , 𝑥2 , … , 𝑥𝑛 với các xác suất tương ứng 𝑃1 , 𝑃2 , … , 𝑃𝑛 .
Khi đó kỳ vọng của X, ký hiệu là 𝐸 (𝑋 ) hay 𝜇 được xác định bởi công thức
𝑛
𝐸 (𝑋 ) = ∑ 𝑥𝑖 𝑃𝑖
(1.1)
𝑖=1
Nếu 𝑋 là đại lượng ngẫu nhiên liên tục có hàm mật độ xác suất là 𝑓 (𝑥) thì kỳ vọng
của 𝑋 là:
+∞
𝐸 (𝑋 ) = ∫ 𝑥𝑓 (𝑥)𝑑𝑥
(1.2)
−∞
-
Tính chất
i.
𝐸 (𝐶 ) = 𝐶
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 5
ii.
𝐸 (𝐶. 𝑋 ) = 𝐶. 𝐸 (𝑋 ), với 𝐶 là hằng số.
iii.
𝐸 (𝑋 + 𝑌 ) = 𝐸 (𝑋 ) + 𝐸 (𝑌 )
iv.
Nếu X và Y là hai đại lượng ngẫu nhiên độc lập thì:
𝐸 (𝑋. 𝑌) = 𝐸 (𝑋 ). 𝐸 (𝑌)
-
Ý nghĩa: Kỳ vọng của một đại lượng ngẫu nhiên chính là giá trị trung bình
(theo xác suất) của đại lượng ngẫu nhiên đó. Nó là điểm trung tâm của phân phối mà các
giá trị cụ thể của X sẽ tập trung quanh đó.
1.4.
Phương sai (Variance)
Định nghĩa: Phương sai (trung bình bình phương độ lệch) của đại lượng ngẫu
nhiên X, ký hiệu 𝑉𝑎𝑟(𝑋 ) hay 𝑉 (𝑋 ) được xác định bởi công thức:
𝑉𝑎𝑟(𝑋 ) = 𝐸 [(𝑋 − 𝜇)2 ]
(1.3)
Nếu X là đại lượng ngẫu nhiên rời rạc có thể nhận các giá trị 𝑥1 , 𝑥2 , … , 𝑥𝑛 với xác
xác suất tương ứng là 𝑃1 , 𝑃2 , … , 𝑃𝑛 thì:
𝑛
𝑉𝑎𝑟(𝑋 ) = ∑[𝑥𝑖 − 𝜇]2 𝑃𝑖
(1.4)
𝑖=1
Nếu X là đại lượng ngẫu nhiên liên tục có hàm mật độ xác suất là 𝑓(𝑥) thì:
+∞
𝑉𝑎𝑟(𝑋 ) = ∫ [𝑥 − 𝜇]2 𝑓 (𝑥)𝑑𝑥
(1.5)
−∞
Trong thực tế ta thường tính phương sai bằng công thức:
𝑉𝑎𝑟(𝑋 ) = 𝐸 [𝑋 2 ] − [𝐸 (𝑋 )]2
(1.6)
Tính chất:
i. 𝑉𝑎𝑟(𝑋 ) = 0
ii. 𝑉𝑎𝑟(𝐶. 𝑋 ) = 𝐶 2 . 𝑉𝑎𝑟(𝑋 );
iii. Nếu X, Y là 2 biến ngẫu nhiên độc lập thì:
𝑉𝑎𝑟(𝑋 + 𝑌) = 𝑉𝑎𝑟(𝑋 − 𝑌) = 𝑉𝑎𝑟(𝑋 ) + 𝑉𝑎𝑟(𝑌)
(1.7)
Ý nghĩa: 𝑋 − 𝜇 là độ lệch khỏi giá trị trung bình. Do đó phương sai 𝑉𝑎𝑟(𝑋 ) gọi là
trung bình bình phương độ lệch. Nên phương sai phản ánh mức độ phân tán của các giá
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 6
trị của đại lượng ngẫu nhiên quanh giá trị trung bình hay kỳ vọng. Đại lượng ngẫu nhiên
có phương sai càng lớn thì giá trị càng phân tán và ngược lại.
1.5.
Độ lệch chuẩn
Định nghĩa: Độ lệch chuẩn của đại lượng ngẫu nhiên X, ký hiệu 𝜎(𝑋) được xác
định bởi công thức:
𝜎(𝑋 ) = √𝑉𝑎𝑟(𝑋 )
1.6.
(1.8)
Hiệp phương sai (Covariance)
Cho 2 biến ngẫu nhiên X và Y, ta có định nghĩa hiệp phương sai của X và Y, ký
hiêu 𝐶𝑜𝑣 (𝑋, 𝑌):
𝐶𝑜𝑣(𝑋, 𝑌) = 𝐸[(𝑋 − 𝜇𝑥 )(𝑌 − 𝜇𝑦 )]
(1.9)
trong đó 𝜇𝑥 , 𝜇𝑦 lần lượt là kỳ vọng của X, Y.
Một công thức tương đương của hiệp phương sai:
𝐶𝑜𝑣(𝑋, 𝑌) = 𝐸 [𝑋𝑌] − 𝜇𝑥 𝜇𝑦
(1.10)
Ý nghĩa của hiệp phương sai là sự biến thiên cùng nhau của 2 biến ngẫu nhiên:
Nếu 2 biến có xu hướng thay đổi cùng nhau (nghĩa là, khi một biến có giá trị cao hơn kỳ
vọng thì biến kia cũng có xu hướng cao hơn kỳ vọng), thì hiệp phương sai của hai biến
này có giá trị dương. Mặt khác, nếu một biến nằm trên giá trị kỳ vọng còn biến kia có xu
hướng nằm dưới giá trị kỳ vọng, thì hiệp phương sai của hai biến có giá trị âm.
Nếu 2 biến ngẫu nhiên là độc lập thì 𝐶𝑜𝑣 (𝑋, 𝑌) = 0 tuy nhiên điều ngược lại
không đúng. Các biến ngẫu nhiên mà có hiêp phương sai bằng 0 được gọi là không tương
quan (uncorrelated), chúng có thể độc lập nhau hoặc không.
Như vậy nếu X, Y độc lập ta có 𝐸 [𝑋𝑌] = 𝜇𝑥 𝜇𝑦 .
Tính chất
-
𝐶𝑜𝑣 (𝑋, 𝑌) = 𝑉𝑎𝑟(𝑋)
-
𝐶𝑜𝑣 (𝑋, 𝑌) = 𝐶𝑜𝑣 (𝑌, 𝑋 )
-
𝐶𝑜𝑣 (𝑎𝑋, 𝑏𝑌) = 𝑎𝑏𝐶𝑜𝑣 (𝑋, 𝑌)
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 7
-
𝐶𝑜𝑣 (𝑋1 + 𝑋2 , 𝑌1 + 𝑌2 ) = 𝐶𝑜𝑣 (𝑋1 , 𝑌1 ) + 𝐶𝑜𝑣 (𝑋2 , 𝑌1 ) + 𝐶𝑜𝑣 (𝑋1 , 𝑌2 ) +
𝐶𝑜𝑣 (𝑋2 , 𝑌2 )
1.7.
𝑉𝑎𝑟(𝑋 + 𝑌) = 𝑉𝑎𝑟(𝑋 ) + 𝑉𝑎𝑟(𝑌) + 2𝐶𝑜𝑣(𝑋, 𝑌)
Ma trận hiệp phương sai
Như chúng ta vừa trình bày, hiệp phương sai là đại lượng tính toán sự tương quan
giữa 2 biến ngẫu nhiên.
Vậy giả sử chúng ta có một vector biến ngẫu nhiên có 3 phần tử 𝑋1 , 𝑋2 , 𝑋3 . Nếu ta
muốn tính toán sự tương quan giữa tất cả các cặp biến ngẫu nhiên thì ta phải tính tất cả 3
hiệp phương sai 𝐶𝑜𝑣 (𝑋1 , 𝑋2 ), 𝐶𝑜𝑣 (𝑋1 , 𝑋3 ), 𝐶𝑜𝑣(𝑋2 , 𝑋3 ).
Một cách tổng quát, ma trận hiệp phương sai đã ra đời để cho phép ta tính tất cả
các 𝐶𝑜𝑣 giữa 2 biến ngẫu nhiên trong một vector biến ngẫu nhiên.
Cho một vector biến ngẫu nhiên X chứa n biến ngẫu nhiên, ma trận hiệp phương
sai của X, kỹ hiệu là ∑, được định nghĩa là:
∑ =[
𝐶𝑜𝑣 (𝑋1 , 𝑋1 )
𝐶𝑜𝑣 (𝑋2 , 𝑋1 )
𝐶𝑜𝑣 (𝑋1 , 𝑋2 )
𝐶𝑜𝑣 (𝑋2 , 𝑋2 )
⋮
𝐶𝑜𝑣 (𝑋𝑛 , 𝑋1 )
𝐶𝑜𝑣 (𝑋𝑛 , 𝑋2 )
⋯
⋱
⋯
𝐶𝑜𝑣 (𝑋1 , 𝑋𝑛 )
𝐶𝑜𝑣 (𝑋2 , 𝑋𝑛 )
]
⋮
𝐶𝑜𝑣 (𝑋𝑛 , 𝑋𝑛 )
𝑋1
Với 𝑋 = [ ⋮ ]
𝑋𝑛
Quan sát trên đường chéo của ma trận hiệp phương sai (i=j) ta thấy tại đó là các
phương sai, vì 𝐶𝑜𝑣 (𝑋𝑖 , 𝑋𝑖 ) = 𝑉𝑎𝑟(𝑋𝑖 )
1.8.
Phân phối chuẩn (phân phối Gaussian)
Trong thực tế, người ta thường sử dụng phân phối xác suất có tên là phân phối
chuẩn (normal distribution) hay phân phối Gaussian.
Một biến ngẫu nhiên X được gọi là có phân phối Gaussian khi nó có hàm mật độ
là hàm Gaussian, ký hiệu là 𝑋~𝒩(𝜇, 𝜎) gọi là X có phân phối chuẩn với tham số 𝜇, 𝜎.
Khi đó hàm mật độ của X là:
𝑓 (𝑥; 𝜇, 𝜎) =
Lý thuyết và các ứng dụng của bộ lọc Kalman
1
𝜎√2𝜋
𝑒
−
(𝑥−𝜇)2
2𝜎2
Page 8
Với phân phối xác suất như trên, người ta tính được 𝜇, 𝜎 lần lượt là kỳ vọng và độ
lệch chuẩn của X.
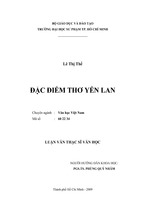
Dưới đây là đồ thị của một số phân phối chuẩn.
Hình 1.1: Đồ thị của một số phân phối chuẩn
Quan sát đồ thị ta thấy phân phối chuẩn có dạng chuông. Giá trị kỳ vọng của X là
𝑋 = 𝜇 là trục đối xứng. Độ lệch chuẩn 𝜎 (hay phương sai 𝜎 2 ) càng lớn thì đồ thị càng
bẹt, nghĩa là các giá trị càng phân tán ra xa kỳ vọng.
Trong thực tế, các loại nhiễu trong các hệ thống đo lường có thể được mô phỏng
một cách chính xác bằng nhiễu trắng cộng. Hay nói cách khác tạp âm trắng Gaussian là
loại nhiễu phổ biến nhất trong hệ thống đo lường. Loại nhiễu này có mật độ phổ công
suất đồng đều trên miền tần số và biên độ tuân theo phân bố Gaussian. Theo phương thức
tác động thì nhiễu Gaussian là nhiễu cộng. Vậy các hệ thống đo lường phổ biến chịu tác
động của nhiễu Gaussian trắng cộng (AWGN).
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 9
Hình 1.2: Nhiễu Gaussian
1.9.
Ước lượng của trung bình và phương sai
Ta chọn ngẫu nhiên n cá thể trong một dân số gồm N cá thể. Ta quan tâm đến đặc
trưng định lượng Y của dân số với trung bình 𝑌̅ và phương sai V(Y). Trong mẫu đó, đặc
trưng Y có trung bình và phương sai đo được lần lượt là 𝑦̅ và 𝜎 2 =
1
𝑛
∑𝑛𝑖=1(𝑦𝑖 − 𝑦̅)2 .
Lưu ý là các giá trị 𝑦̅ và σ2 thay đổi tùy theo mẫu thử, do đó chúng là các biến ngẫu nhiên
với trung bình và phương sai riêng khác nhau.
Ước lượng trung bình của Y:
Thông thường trung bình của Y, tức là 𝑌̅ được ước lượng bởi: 𝑦̅ =
1
𝑛
∑𝑛𝑖=1 𝑦𝑖 ,
còn được gọi là trung bình tích lũy (hay trung bình cộng). Ta chứng minh được đây là
ước lượng không chệch (unbiased), nghĩa là 𝐸 (𝑦̅) = 𝑌
Ước lượng phương sai của Y:
σ2 là một ước lượng của V(Y), nhưng là ước lượng không đúng, ta chứng minh
được kì vọng của σ2 luôn nhỏ hơn V(Y), tức ước lượng là thiếu.
Các ước lượng đúng của V(Y) là:
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 10
𝑛
𝑛−1
𝜎2
𝑁
(1.11) trong trường hợp lấy mẫu có hoàn lại
𝑛
𝑁−1 𝑛−1
𝜎2
(1.12) trong trường hợp lấy mẫu không hoàn lại
Trong trường hợp mẫu lớn, phép tính có hoàn lại và phép tính không hoàn lại là
như nhau, vì
𝑁
𝑁−1
V(Y) là: 𝑠 2 =
xấp xỉ bằng 1. Vì vậy trong trường hợp tổng quát ước lượng đúng của
1
𝑛−1
∑𝑛𝑖=1(𝑦𝑖 − 𝑦̅)2 được gọi là phương sai tích lũy của Y.
1.10. Phương pháp bình phương tối thiểu
Trong toán học, phương pháp bình phương tối thiểu, còn gọi là bình phương nhỏ
nhất hay bình phương trung bình tối thiểu, là một phương pháp tối ưu hóa để lựa chọn
một đường khớp nhất cho một dải dữ liệu ứng với cực trị của tổng các sai số thống kê
(error) giữa đường khớp và dữ liệu.
Phương pháp này giả định các sai số (error) của phép đo đạc dữ liệu phân phối
ngẫu nhiên. Định lý Gauss-Markov chứng minh rằng kết quả thu được từ phương pháp
bình phương tối thiểu không thiên vị và sai số của việc đo đạc dữ liệu không nhất thiết
phải tuân theo, ví dụ, phân bố Gauss. Một phương pháp mở rộng từ phương pháp này là
bình phương tối thiểu có trọng số.
Phương pháp bình phương tối thiểu thường được dùng trong khớp đường cong.
Nhiều bài toán tối ưu hóa cũng được quy về việc tìm cực trị của dạng bình phương, ví dụ
như tìm cực tiểu của năng lượng hay cực đại của entropy.
Giả sử dữ liệu gồm các điểm (xi, yi) với i = 1, 2, ..., n. Chúng ta cần tìm một hàm
số f thỏa mãn:
𝑓(𝑥𝑖 ) ≈ 𝑦𝑖
(1.13)
Giả sử hàm f có thể thay đổi hình dạng, phụ thuộc vào một số tham số, pj với j = 1,
2, ..., m.
𝑓(𝑥) ≈ 𝑓(𝑝𝑗 , 𝑥)
(1.14)
Nội dung của phương pháp là tìm giá trị của các tham số pj sao cho biểu thức sau
đạt cực tiểu:
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 11
𝑛
χ2 = ∑(𝑦𝑖 − 𝑓(𝑥𝑖 ))2
(1.15)
𝑖=1
Nội dung này giải thích tại sao tên của phương pháp là bình phương tối thiểu.
Đôi khi thay vì tìm giá trị nhỏ nhất của tổng bình phương, người ta có thể tìm giá
trị nhỏ nhất của bình phương trung bình:
𝑛
1
χ2 = ∑(𝑦𝑖 − 𝑓(𝑥𝑖 ))2
𝑛
(1.16)
𝑖=1
Điều này dẫn đến tên gọi bình phương trung bình tối thiểu.
Trong hồi quy tuyến tính, người ta thay biểu thức
𝑓 (𝑥𝑖 ) ≈ 𝑦𝑖
bằng
𝑓(𝑥𝑖 ) = 𝑦𝑖 + 𝜀𝑖
(1.17)
với hệ số nhiễu ε là biến ngẫu nhiên có giá trị kỳ vọng bằng 0.
Trong biểu thức của hồi quy tuyến tính x được đo chính xác, chỉ có y chịu nhiễu loạn ε.
Thêm nữa, hàm f tuyến tính với các tham số pj. Nếu f không tuyến tính với các tham số,
ta có hồi quy phi tuyến, một bài toán phức tạp hơn nhiều hồi quy tuyến tính.
2. Bộ lọc Kalman
2.1.
Giới thiệu chung về bộ lọc Kalman
Được đề xuất từ năm 1960 bởi giáo sư Kalman để thu thập và kết hợp linh động
các thông tin từ cảm biến thành phần. Một khi phương trình định hướng và mẫu thống kê
nhiễu trên mỗi cảm biến được biết và xác định, bộ lọc Kalman sẽ cho ước lượng giá trị
tối ưu (chính xác do đã được loại sai số, nhiễu) như là đang sử dụng một tín hiệu “tinh
khiết” và có độ phân bổ không đổi. Trong hệ thống này, tín hiệu cảm biến vào bộ lọc
gồm hai tín hiệu: từ cảm biến góc (inclinometer) và cảm biến vận tốc góc (gyro). Tín hiệu
đầu ra của bộ lọc là tín hiệu của inclinometer và gyro đã được loại nhiễu nhờ hai nguồn
tín hiệu hỗ trợ và xử lý lẫn nhau trong bộ lọc, thông qua quan hệ (vận tốc góc = đạo
hàm/vi phân của giá trị góc.
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 12
Bô lọc Kalman đơn giản là thuật toán xử lý dữ liệu hồi quy tối ưu. Có nhiều cách
xác định tối ưu, phụ thuộc tiêu chuẩn lựa chọn trình thông số đánh giá. Nó cho thấy rằng
bộ lọc Kalman tối ưu đối với chi tiết cụ thể trong bất kỳ tiêu chuẩn có nghĩa nào. Một
khía cạnh của sự tối ưu này là bộ lọc Kalman hợp nhất tất cả thông tin được cung cấp tới
nó. Nó xử lý tất cả giá trị sẵn có, ngoại trừ độ sai số, ước lượng giá trị hiện thời của
những giá trị quan tâm, với cách sử dụng hiểu biết động học thiết bị giá trị và hệ thống,
mô tả số liệu thống kê của hệ thống nhiễu, gồm nhiễu ồn, nhiễu đo và sự không chắc
chắn trong mô hình động học, và những thông tin bất kỳ về điều kiện ban đầu của giá trị
quan tâm.
Hình 1.3: Mô hình đo lường ước lượng của bộ lọc Kalman
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 13
Hình 1.4: Tín hiệu thu trước và sau khi lọc qua Kalman
Hình 1.3 trên mô hình hóa hoạt động của mạch lọc Kalman. Chúng ta có tín hiệu
đo được, chúng ta có mô hình của tín hiệu đo được (đòi hỏi tuyến tính) và sau đó là áp
dụng vào trong hệ thống phương trình của mạch lọc để ước lượng trạng thái quan tâm.
Thực ra tín hiệu đo là không khó, phương trình đã có sẵn, cái chung ta cần chính là mô
hình hoá hệ thống. Để có thể ứng dụng một cách hiểu quả mạch lọc Kalman thì chúng ta
phải mô hình hóa được một cách tuyến tính sự thay đổi của trạng thái cần ước lượng hoặc
dự đoán.
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 14
2.2. Mô hình toán học
2.2.1. Hệ thống và mô hình quan sát
Chúng ta giả sử rằng có thể mô hình hóa bởi phương trình chuyển trạng thái
𝑥𝑘+1 = 𝑭𝑘 𝑥𝑘 + 𝑮𝑘 𝒖𝑘 + 𝑤𝑘
(2.1)
Trong đó 𝑥𝑘 là trạng thái tại thời điểm k, 𝒖𝑘 là vector điều khiển đầu vào, 𝑤𝑘 là hệ
thống cộng hay nhiễu quá trình – thường là nhiễu Gaussian trắng cộng (AWGN) , 𝑮𝑘 là
ma trận chuyển đổi đầu vào và 𝑭𝑘 là ma trận chuyển trạng thái.
Ngoài ra chúng ta giả sử rằng, khả năng quan sát trạng thái được thực hiện thông
qua một hệ thống đo lường có thể được biểu diễn bởi một phương trình tuyến tính như
sau
𝑧𝑘 = 𝑯𝑘 𝑥𝑘 + 𝒗𝑘
(2.2)
Trong đó 𝑧𝑘 là thông tin quan sát hay đo lường thực hiện tại thời điểm 𝑘, 𝑥𝑘 là
trạng thái tại thời điểm 𝑘, 𝑯𝑘 là ma trận quan sát và 𝒗𝑘 là nhiễu cộng trong quá trình đo
lường.
Hình 2.1: Mô hình không gian trạng thái
2.2.2. Giả thiết
Chúng ta giả thiết như sau
Nhiễu quá trình và nhiễu đo lường 𝒘𝑘 và 𝒗𝑘 là không tương quan, là nhiễu
Gaussian trắng cộng (AWGN) có giá trị trung bình bằng không và ma trận
hiệp phương sai đã biết.
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 15
Khi đó,
𝑸𝑘
0
𝑹
𝐸 [𝑣𝑘 𝑣𝑙𝑇 ] = { 𝑘
0
𝑇
𝐸 [𝑤𝑘 𝑣𝑙 ] = 0
𝐸 [𝑤𝑘 𝑤𝑙𝑇 ] = {
𝑘=𝑙
𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒,
𝑘=𝑙
𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒,
𝑓𝑜𝑟 𝑎𝑙𝑙 𝑘, 𝑙
(2.3)
(2.4)
(2.5)
Trong đó 𝑸𝑘 và 𝑹𝑘 là các ma trận đối xứng nửa xác định dương.
Trạng thái khởi tạo hệ thống 𝑥0 là một vector ngẫu nhiên không tương quan
với cả hệ thống và nhiễu đo lường.
Trạng thái khởi tạo hệ thống có giá trị trung bình và ma trận hiệp phương
sai đã biết.
𝑥̂0|0 = 𝐸 [𝑥0 ] 𝑣à 𝑃0|0 = 𝐸[(𝑥̂0|0 − 𝑥0 )(𝑥̂0|0 − 𝑥0 )𝑇 ]
(2.6)
Đưa ra những giả định trên với mục đích để xác định, đưa ra tập giá trị quan sát
𝑧1 , … , 𝑧𝑘+1 , bộ lọc ước lượng ở thời điểm 𝑘 + 1 tạo ra một ước lượng tối ưu của trạng
thái 𝑥𝑘+1 mà chúng ta ký hiệu bởi 𝑥̂𝑘+1 , tối thiểu hóa kỳ vọng của hàm tổn thất bình
phương lỗi.
2
𝐸[‖𝑥𝑘+1 − 𝑥̂𝑘+1 ‖ ] = 𝐸[(𝑥𝑘+1 − 𝑥̂𝑘+1 )𝑇 (𝑥𝑘+1 − 𝑥̂𝑘+1 )]
(2.7)
2.2.3. Nguồn gốc
Ký hiệu ước lượng dự đoán của trạng thái 𝑥𝑘+1 dựa trên quan sát ở thời điểm 𝑘,
𝑧1 , … , 𝑧𝑘 là 𝑥̂𝑘+1|𝑘 . Đó được gọi là một bước trước dự đoán hay đơn giản là dự đoán. Bây
giờ, giải pháp để tối thiểu hóa phương trình (2.7) là kỳ vọng của trạng thái ở thời điểm
𝑘 + 1 được ước định dựa trên quan sát ở thời điểm 𝑘. Như vậy,
𝑥̂𝑘+1|𝑘 = 𝐸 [𝑥𝑘+1 |𝑧1 , … , 𝑧𝑘 ] = 𝐸 [𝑥𝑘+1 |𝚭 𝑘 ]
(2.8)
Khi đó trạng thái dự đoán được cho bởi
𝑥̂𝑘+1|𝑘 = 𝐸 [𝑥𝑘+1 |𝚭 𝑘 ]
= 𝐸 [𝑭𝑘 𝑥𝑘 + 𝑮𝑘 𝑢𝑘 + 𝑤𝑘 |𝚭 𝑘 ]
= 𝑭𝑘 𝐸 [𝑥𝑘 |𝚭 𝑘 ] + 𝑮𝑘 𝑢𝑘 + 𝐸 [𝑤𝑘 |𝚭 𝑘 ]
= 𝑭𝑘 𝑥̂𝑘|𝑘 + 𝑮𝑘 𝑢𝑘
(2.9)
Khi sử dụng trong thực tế, nhiễu quá trình có giá trị trung bình là 0 và 𝑢𝑘 đã được
biết chính xác.
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 16
Hiệp phương sai ước lượng dự đoán 𝑷𝑘+1|𝑘 là trung bình bình phương sai số trong
ước lượng 𝑥̂𝑘+1|𝑘 .
Vì vậy, bằng việc sử dụng các sự kiện mà 𝑤𝑘 và 𝑥̂𝑘|𝑘 là không tương quan:
𝑷𝑘+1|𝑘 = 𝑐𝑜𝑣(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘 )
𝑇
= 𝐸 [(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘 )(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘 ) |𝚭 𝑘 ]
= 𝑐𝑜𝑣(𝑭𝑘 (𝑥𝑘 − 𝑥̂𝑘|𝑘 ) + 𝑤𝑘 ) = 𝑭𝑘 𝑐𝑜𝑣(𝑥𝑘 − 𝑥̂𝑘|𝑘 )𝑭𝑇𝑘 + 𝐸 [𝑤𝑘 𝑤𝑘𝑇 ]
= 𝑭𝑘 𝑷𝑘|𝑘 𝑭𝑇𝑘 + 𝑸𝑘
(2.10)
Đang có một ước lượng dự đoán 𝑥̂𝑘+1|𝑘 , giả sử rằng chúng ta đang có một giá trị
quan sát 𝑧𝑘+1 . Làm sao để sử dụng thông tin này để cập nhật trạng thái dự đoán, tức là
tìm 𝑥̂𝑘+1|𝑘+1 . Chúng ta giả sử rằng ước lượng là tổng trọng số tuyến tính của dự đoán và
quan sát mới và có thể được mô tả bởi phương trình,
𝑥̂𝑘+1|𝑘+1 = 𝑲′𝑘+1 𝑥̂𝑘+1|𝑘 + 𝑲𝑘+1 𝑧𝑘+1
(2.11)
Trong đó 𝑲′𝑘+1 và 𝑲𝑘+1 là những ma trận hiệu chỉnh bù hay ma trận độ lời (của
các kích thước khác nhau). Vấn đề của chúng ta bây giờ là tìm 𝑲′𝑘+1 và 𝑲𝑘+1 để tối thiểu
hóa điều kiện ước lượng trung bình bình phương sai số. Sai số dự đoán được cho bởi
𝑥̃𝑘+1|𝑘+1 = 𝑥̂𝑘+1|𝑘+1 − 𝑥𝑘+1
(2.12)
2.2.4. Điều kiện không chệch
̂ 𝑘+1|𝑘+1 ] = 𝐸[𝑥𝑘+1 ]. Giả sử rằng 𝑥̂𝑘|𝑘 là một ước
Để bộ lọc không chệch yêu cầu 𝐸[𝑥
lượng không chệch. Kết hợp phương trình (2.11) và (2.12) và tính kỳ vọng
𝐸[𝑥̂𝑘+1|𝑘+1 ] = 𝐸[𝑲′𝑘+1 𝑥̂𝑘+1|𝑘 + 𝑲𝑘+1 𝑯𝑘+1 𝑥𝑘+1 + 𝑲𝑘+1 𝑣𝑘+1 ]
= 𝑲′𝑘+1 𝐸[𝑥̂𝑘+1|𝑘 ] + 𝑲𝑘+1 𝑯𝑘+1 𝐸 [𝑥𝑘+1 ] + 𝑲𝑘+1 𝐸 [𝑣𝑘+1 ]
(2.13)
Vì 𝐸 [𝑣𝑘+1 ] = 0, và dự đoán là không chệch:
𝐸[𝑥̂𝑘+1|𝑘 ] = 𝐸[𝑭𝑘 𝑥̂𝑘|𝑘 + 𝑮𝑘 𝑢𝑘 ]
= 𝑭𝑘 𝐸[𝑥̂𝑘|𝑘 ] + 𝑮𝑘 𝑢𝑘
= 𝐸 [𝑥𝑘+1 ]
Lý thuyết và các ứng dụng của bộ lọc Kalman
(2.14)
Page 17
Do đó kết hợp phương trình (2.13) và (2.14)
𝐸[𝑥̂𝑘+1|𝑘+1 ] = (𝑲′𝑘+1 + 𝑲𝑘+1 𝑯𝑘+1 )𝐸 [𝑥𝑘+1 ]
Và điều kiện để 𝑥̂𝑘+1|𝑘+1 không chệch yêu cầu
𝑲′𝑘+1 + 𝑲𝑘+1 𝑯𝑘+1 = 𝑰
ℎ𝑎𝑦 𝑲′𝑘+1 = 𝑰 − 𝑲𝑘+1 𝑯𝑘+1
(2.15)
Để ước lượng không chệch yêu cầu
𝑥̂𝑘+1|𝑘+1 = (𝑰 − 𝑲𝑘+1 𝑯𝑘+1 )𝑥̂𝑘+1|𝑘 + 𝑲𝑘+1 𝑧𝑘+1
= 𝑥̂𝑘+1|𝑘 + 𝑲𝑘+1 [𝑧𝑘+1 − 𝑯𝑘+1 𝑥̂𝑘+1|𝑘 ]
(2.16)
Trong đó 𝑲 được gọi là độ lời của bộ lọc Kalman (Kalman gain).
𝑯𝑘+1 𝑥̂𝑘+1|𝑘 có thể được hiểu như một quan sát hay đo lường dự đoán 𝑧̂𝑘+1|𝑘
𝑧̂𝑘+1|𝑘 = 𝐸 [𝑧𝑘+1 |𝚭 𝑘 ]
= 𝐸 [𝑯𝑘+1 𝑥𝑘+1 + 𝒗𝑘+1 |𝚭 𝑘 ]
= 𝑯𝑘+1 𝑥̂𝑘+1|𝑘
(2.17)
Đặt 𝒓𝑘+1 là độ lệch đo lường thể hiện sự sai khác giữa giá trị đo lường 𝑧𝑘+1 và
ước lượng của nó 𝑧̂𝑘+1|𝑘 , được biểu diễn bởi
𝒓𝑘+1 = 𝑧𝑘+1 − 𝑯𝑘+1 𝑥̂𝑘+1|𝑘
(2.18)
𝐸 [𝒓𝑘+1 |𝚭 𝑘 ] = 𝐸[𝑧𝑘+1 − 𝑧̂𝑘+1|𝑘 |𝚭 𝑘 ]
= 𝐸 [𝑧𝑘+1 |𝚭 𝑘 ] − 𝑧̂𝑘+1|𝑘
=0
(2.19)
Kết hợp (2.16) và (2.18) ta được
𝑥̂𝑘+1|𝑘+1 = 𝑥̂𝑘+1|𝑘 + 𝑲𝑘+1 𝒓𝑘+1
Lý thuyết và các ứng dụng của bộ lọc Kalman
(2.20)
Page 18
Hiệp phương sai độ lệch đo lường 𝑺𝑘+1 được cho bởi,
𝑺𝑘+1 = 𝐸 [𝒓𝑘+1 𝒓𝑇𝑘+1 ]
𝑇
= 𝐸 [(𝑧𝑘+1 − 𝑯𝑘+1 𝑥̂𝑘+1|𝑘 )(𝑧𝑘+1 − 𝑯𝑘+1 𝑥̂𝑘+1|𝑘 ) ]
𝑺𝑘+1 = 𝑯𝑘+1 𝑷𝑘+1|𝑘 𝑯𝑇𝑘+1 + 𝑹𝑘+1
(2.21)
2.2.5. Hiệp phương sai sai số
Chúng ta xác định hiệp phương sai sai số dự đoán của phương trình (2.10). Bây
giờ chúng ta tính toán hiệp phương sai sai số điều chỉnh.
𝑇
𝑷𝑘+1|𝑘+1 = 𝐸 [(𝑥̃𝑘+1|𝑘+1 )(𝑥̃𝑘+1|𝑘+1 ) |𝚭 𝑘 ]
𝑇
= 𝐸 [(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘+1 )(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘+1 ) ]
= 𝑐𝑜𝑣(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘+1 )
= 𝑐𝑜𝑣(𝑥𝑘+1 − (𝑥̂𝑘+1|𝑘 + 𝑲𝑘+1 (𝑧𝑘+1 − 𝑯𝑘+1 𝑥̂𝑘+1|𝑘 ))
= 𝑐𝑜𝑣 (𝑥𝑘+1 − ( 𝑥̂𝑘+1|𝑘 + 𝑲𝑘+1 (𝑯𝑘+1 𝑥𝑘+1 + 𝒗𝑘+1 − 𝑯𝑘+1 𝑥̂𝑘+1|𝑘 )))
= 𝑐𝑜𝑣 ((𝑰 − 𝑲𝑘+1 𝑯𝑘+1 )(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘 ) − 𝑲𝑘+1 𝒗𝑘+1 )
= 𝑐𝑜𝑣 ((𝑰 − 𝑲𝑘+1 𝑯𝑘+1 )(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘 )) + 𝑐𝑜𝑣(𝑲𝑘+1 𝒗𝑘+1 )
= (𝑰 − 𝑲𝑘+1 𝑯𝑘+1 )𝑐𝑜𝑣(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘 )(𝑰 − 𝑲𝑘+1 𝑯𝑘+1 )𝑇 + 𝑲𝑘+1 𝑐𝑜𝑣(𝒗𝑘+1 )𝑲𝑇𝑘+1
𝑷𝑘+1|𝑘+1 = (𝑰 − 𝑲𝑘+1 𝑯𝑘+1 )𝑷𝑘+1|𝑘 (𝑰 − 𝑲𝑘+1 𝑯𝑘+1 )𝑇 + 𝑲𝑘+1 𝑹𝑘+1 𝑲𝑇𝑘+1
(2.22)
Ta có thể tính toán 𝑷𝑘+1|𝑘+1 theo cách khác như sau
𝑷𝑘+1|𝑘+1 = 𝑐𝑜𝑣(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘+1 )
= 𝑐𝑜𝑣(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘 − 𝑲𝑘+1 𝒓𝑘+1 )
= 𝑐𝑜𝑣(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘 ) − 𝑐𝑜𝑣(𝑲𝑘+1 𝒓𝑘+1 )
= 𝑷𝑘+1|𝑘 − 𝑲𝑘+1 𝑺𝑘+1 𝑲𝑇𝑘+1
Lý thuyết và các ứng dụng của bộ lọc Kalman
(2.23)
Page 19
Trong đó,
𝑷𝑘+1|𝑘 = 𝑐𝑜𝑣(𝑥𝑘+1 − 𝑥̂𝑘+1|𝑘 )
𝑇 ]
𝑹𝑘+1 = 𝑐𝑜𝑣 (𝒗𝑘+1 ) = 𝐸 [𝑣𝑘+1 𝑣𝑘+1
Vì vậy hiệp phương sai của ước lượng điều chỉnh đã được biểu diễn qua hiệp
phương sai dự đoán 𝑷𝑘+1|𝑘 , nhiễu đo lường 𝑹𝑘+1 và ma trận độ lời Kalman 𝑲𝑘+1
2.2.6. Độ lời Kalman
Mục tiêu của chúng ta là làm sao để tối thiểu hóa trung bình bình phương sai số
ước lượng có điều kiện với độ lời Kalman 𝑲.
𝑇
𝐿 = min 𝐸 [(𝑥̃𝑘+1|𝑘+1 ) (𝑥̃𝑘+1|𝑘+1 )|𝚭 𝑘 ]
𝑲𝑘+1
𝑇
= min 𝑡𝑟𝑎𝑐𝑒 (𝐸 [(𝑥̃𝑘+1|𝑘+1 ) (𝑥̃𝑘+1|𝑘+1 )|𝚭 𝑘 ])
𝑲𝑘+1
= min 𝑡𝑟𝑎𝑐𝑒(𝑷𝑘+1|𝑘+1 )
(2.24)
𝑲𝑘+1
Với bất kỳ ma trận A và ma trận đối xứng B ta có
𝜕
(𝑡𝑟𝑎𝑐𝑒(𝐴𝐵𝐴𝑇 )) = 2𝐴𝐵
𝜕𝐴
Kết hợp (2.23) và (2.24) và lấy vi phân ma trận độ lời và đặt kết quả bằng 0 ta
được
𝜕𝐿
= −2(𝑰 − 𝑲𝑘+1 𝑯𝑘+1 )𝑷𝑘+1|𝑘 𝑯𝑇𝑘+1 + 2𝑲𝑘+1 𝑹𝑘+1 = 0
𝜕𝑲𝑘+1
Sắp xếp lại và đưa ra phương trình cho ma trận độ lời
−1
𝑲𝑘+1 = 𝑷𝑘+1|𝑘 𝑯𝑇𝑘+1 [𝑯𝑘+1 𝑷𝑘+1|𝑘 𝑯𝑇𝑘+1 + 𝑹𝑘+1 ]
(2.25)
Kết hợp với (2.21) ta được
𝑲𝑘+1 = 𝑷𝑘+1|𝑘 𝑯𝑇𝑘+1 𝑺−1
𝑘+1
(2.26)
Cùng với phương trình 2.16, định nghĩa một ước lượng tối ưu tuyến tính trung
bình bình phương sai số.
Lý thuyết và các ứng dụng của bộ lọc Kalman
Page 20
- Xem thêm -